Все началось с Кактуса
Официальной датой создания Государственного научного центра ФГАУ «ЦНИИ робототехники и технической кибернетики» считается 29 января 1968 года. В этот день министр В.Н. Столетов подписал приказ №15сс о создании Особого конструкторского бюро технической кибернетики (ОКБ ТК) при Ленинградском политехническом институте им. М.И. Калинина как его подразделения.
Однако фактически история организации началась тремя годами раньше, когда в начале 1965 года на кафедре «Автоматика и телемеханика» ЛПИ (зав. кафедрой – проф. Б.И. Доманский3) была создана специальная лаборатория технической кибернетики. Возглавил лабораторию доцент Е.И. Юревич.
Одной из задач, за решение которой взялся коллектив лаборатории, было обеспечение мягкой посадки спускаемых аппаратов пилотируемых космических кораблей.
Первая система мягкой посадки на кораблях «Восход» использовала твердотопливные тормозные двигатели, включавшиеся механическим штырем, выдвигаемым вниз. Этот способ был ненадежен из-за возможного приземления на рыхлую или водную поверхность, а также влияния ветра и неровностей, что могло привести к отказу срабатывания и опасности для космонавтов.
К счастью, два полета кораблей «Восход» прошли успешно. У конструкторов появилось время для создания новой системы мягкой посадки перспективных кораблей.
Для этого необходимо было обеспечить довольно высокую точность выдачи сигнала по высоте, желательно, с поправкой на величину вертикальной составляющей скорости. Для того чтобы сформировать требуемую команду, необходимо было создать соответствующий измеритель высоты и скорости. Сложность проблемы определялась жесткими техническими требованиями.
Во-первых, необходимо было обеспечить абсолютную всепогодность. Точность работы не должна была зависеть от того, куда аппарат садится: на воду, лед, снег или твердую почву.
Во-вторых, необходимо было обеспечить нечувствительность прибора к наклонам аппарата и наличию горизонтальной составляющей скорости.
Наконец, в-третьих, требуемая система должна была удовлетворять очень жестким требованиям к надежности и массогабаритным параметрам и работать через обшивку аппарата.
Анализ существующих высотомеров малых высот и других, близких к ним измерительных средств показал, что все они непригодны, и требуется найти какое-то принципиально новое решение, причем срочно.
Идея использования для решения близких задач радиоактивного излучения к тому времени уже существовала, однако не была реализована на практике. За её воплощение и взялись сотрудники лаборатории технической кибернетики.
Техническое задание на изготовление гамма-лучевого высотомера (ГЛВ), получившего в дальнейшем наименования «Изделие 101» или «Кактус», было выдано предприятием п/я 651 (открытое наименование ОКБ-1, ныне – Публичное акционерное общество «Ракетно-космическая корпорация «Энергия» им. С.П. Королева») 23 марта 1965 года. А 7 июля того же года между кафедрой «Автоматика и телемеханика» ЛПИ и предприятием п/я 651 был заключен первый хозяйственный договор № 435/1180 на разработку ГЛВ.
Анализ существующих высотомеров малых высот и других, близких к ним измерительных средств показал, что все они непригодны, и требуется найти какое-то принципиально новое решение, причем срочно.
Идея использования для решения близких задач радиоактивного излучения к тому времени уже существовала, однако не была реализована на практике. За её воплощение и взялись сотрудники лаборатории технической кибернетики.

Техническое задание на изготовление гамма-лучевого высотомера (ГЛВ), получившего в дальнейшем наименования «Изделие 101» или «Кактус», было выдано предприятием п/я 651 (открытое наименование ОКБ-1, ныне – Публичное акционерное общество «Ракетно-космическая корпорация «Энергия» им. С.П. Королева») 23 марта 1965 года. А 7 июля того же года между кафедрой «Автоматика и телемеханика» ЛПИ и предприятием п/я 651 был заключен первый хозяйственный договор № 435/1180 на разработку ГЛВ.
Рождение ОТК ТК
Наступивший 1968 год принес много нового коллективу Е.И. Юревича. Самым важным стало преобразование НИОТК в ОКБ ТК и продолжение работ по совершенствованию системы «Кактус». К моменту юридического оформления новой организации в ней работали 127 человек. К этому времени Ленгорисполком передал для ОКБ ТК здание интерната в доме № 11 по улице Хлопина, в котором организации досталось одно крыло. Остальные площади были заняты студентами-политехниками и архивом.
Вскоре после передачи ОКБ ТК двухэтажного дома на проезде Раевского опытное производство туда переехало, но ненадолго: здание отремонтировали, а затем снесли для строительства НИИ цитологии. Чтобы не сорвать годовой план, часть сотрудников перевели в здание дачи Бенуа с коровником на углу Тихорецкого и Светлановского проспектов, где срочно запустили производственное оборудование.
В 1968 году возникла серьёзная проблема с системой «Кактус» — при испытаниях в Крыму двигатели мягкой посадки срабатывали преждевременно из-за ложных помех, что приводило к отцепке парашюта и свободному падению аппарата. Причина была быстро выявлена — нештатные помехи в цепях питания. Решение задачи на высоком уровне закрепило за ОКБ ТК репутацию эксперта по борьбе с помехами. Руководил работой Е.Н. Григорьев.
Первый успешный полёт с «Кактусом» состоялся на «Союзе-3» с космонавтом Г.Т. Береговым — мягкая посадка прошла безупречно. С тех пор «Кактус» стал штатной системой кораблей «Союз», включая современные «Союзы МС».
В те же годы на 5-м полигоне в Ленинске (Казахстан) была организована постоянная экспедиция ОКБ ТК, а в Москве — отдел для оперативной связи с полигонами.
Работа над «Кактусом» стала школой и проверкой коллектива, основанной на профессионализме и доверии с заказчиками и оборонными организациями.
Успех «Кактуса» стимулировал создание модификаций для других объектов — ОКБ-529 (В.Н. Челомей) и филиала №1 ЦНИИ ЭМ (Д.И. Козлов), где разработали систему мягкой посадки для фоторазведывательной аппаратуры.
Принципиальным шагом стало создание системы «Квант» (1968–1970 гг.) для управления двигателями автоматических лунных станций серии «Луна», доставивших лунный грунт («Луна-16») и запустивших «Луноход-1». Система отличалась рекордными массогабаритными характеристиками и работой через факел работающего двигателя. Главный конструктор А.М. Исаев предоставил стенды для испытаний и поддерживал систему на госкомиссиях. За создание «Кванта» трое сотрудников ОКБ ТК были награждены орденами.
Авиация также заинтересовалась «Кактусом»: для КБ А.Н. Туполева создали систему посадки беспилотного разведчика, для П.О. Сухого — систему выпуска тормозного парашюта, для М.А. Миля и Н.И. Камова — высотомеры малых высот. В военной технике появилась модификация для мягкой посадки десантируемых грузов, включая тяжёлую технику.
Вскоре после передачи ОКБ ТК двухэтажного дома на проезде Раевского опытное производство туда переехало, но ненадолго: здание отремонтировали, а затем снесли для строительства НИИ цитологии. Чтобы не сорвать годовой план, часть сотрудников перевели в здание дачи Бенуа с коровником на углу Тихорецкого и Светлановского проспектов, где срочно запустили производственное оборудование.
В 1968 году возникла серьёзная проблема с системой «Кактус» — при испытаниях в Крыму двигатели мягкой посадки срабатывали преждевременно из-за ложных помех, что приводило к отцепке парашюта и свободному падению аппарата. Причина была быстро выявлена — нештатные помехи в цепях питания. Решение задачи на высоком уровне закрепило за ОКБ ТК репутацию эксперта по борьбе с помехами. Руководил работой Е.Н. Григорьев.
Первый успешный полёт с «Кактусом» состоялся на «Союзе-3» с космонавтом Г.Т. Береговым — мягкая посадка прошла безупречно. С тех пор «Кактус» стал штатной системой кораблей «Союз», включая современные «Союзы МС».
В те же годы на 5-м полигоне в Ленинске (Казахстан) была организована постоянная экспедиция ОКБ ТК, а в Москве — отдел для оперативной связи с полигонами.
Работа над «Кактусом» стала школой и проверкой коллектива, основанной на профессионализме и доверии с заказчиками и оборонными организациями.
Успех «Кактуса» стимулировал создание модификаций для других объектов — ОКБ-529 (В.Н. Челомей) и филиала №1 ЦНИИ ЭМ (Д.И. Козлов), где разработали систему мягкой посадки для фоторазведывательной аппаратуры.
Принципиальным шагом стало создание системы «Квант» (1968–1970 гг.) для управления двигателями автоматических лунных станций серии «Луна», доставивших лунный грунт («Луна-16») и запустивших «Луноход-1». Система отличалась рекордными массогабаритными характеристиками и работой через факел работающего двигателя. Главный конструктор А.М. Исаев предоставил стенды для испытаний и поддерживал систему на госкомиссиях. За создание «Кванта» трое сотрудников ОКБ ТК были награждены орденами.
Авиация также заинтересовалась «Кактусом»: для КБ А.Н. Туполева создали систему посадки беспилотного разведчика, для П.О. Сухого — систему выпуска тормозного парашюта, для М.А. Миля и Н.И. Камова — высотомеры малых высот. В военной технике появилась модификация для мягкой посадки десантируемых грузов, включая тяжёлую технику.
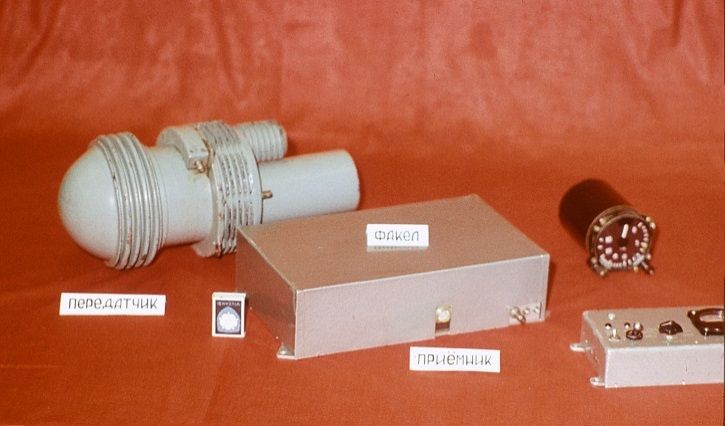
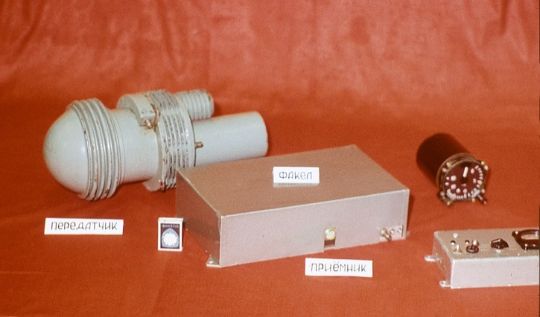
В 1968–1970 годах разработали импульсный рентгеновский высотомер «Факел» (руководитель Ф.Л. Герчиков), успешно прошедший испытания и отличавшийся независимостью от свойств поверхности. Его использовали для измерения толщины льда в Арктике, важного для полярной авиации. На базе «Факела» прорабатывали комплексирование с радиотехническими высотомерами.
Далее появились системы управления летательными аппаратами на сверхнизких высотах: «Луч» для экранолёта Р.Е. Алексеева (1970–1971 гг.), измерявшая высоту, крен и угол атаки, и «Вал» — для определения параметров волн. Эти системы успешно испытали, но проект прекратили.
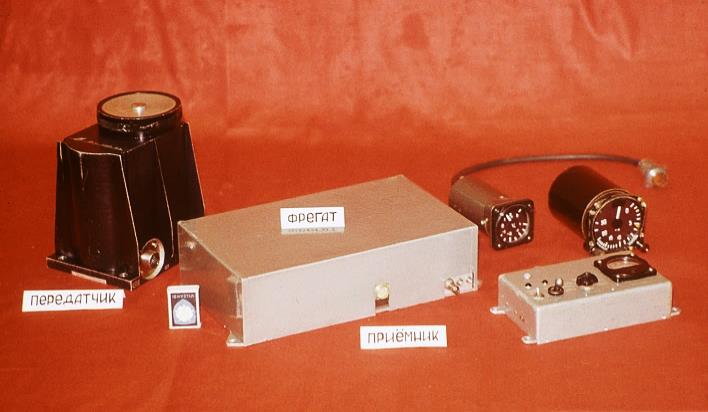
Аналогичная система «Фрегат» была создана для гидросамолётов Н.И. Камова. Позже разработали системы измерения вертикальной и горизонтальной скорости — «Рысь-К» и другие.
На базе этих разработок создали системы управления полётом крылатых ракет (Г.А. Ефремов) и дистанционные взрыватели (П.Д. Грушин, А.Г. Шипунов), включая миниатюрные лазерные взрыватели (руководители Ф.Л. Герчиков и Е.Н. Григорьев). Также была создана система «Лира» для управления индивидуальными летательными аппаратами типа «Реактивный ранец» (А.Д. Надирадзе).
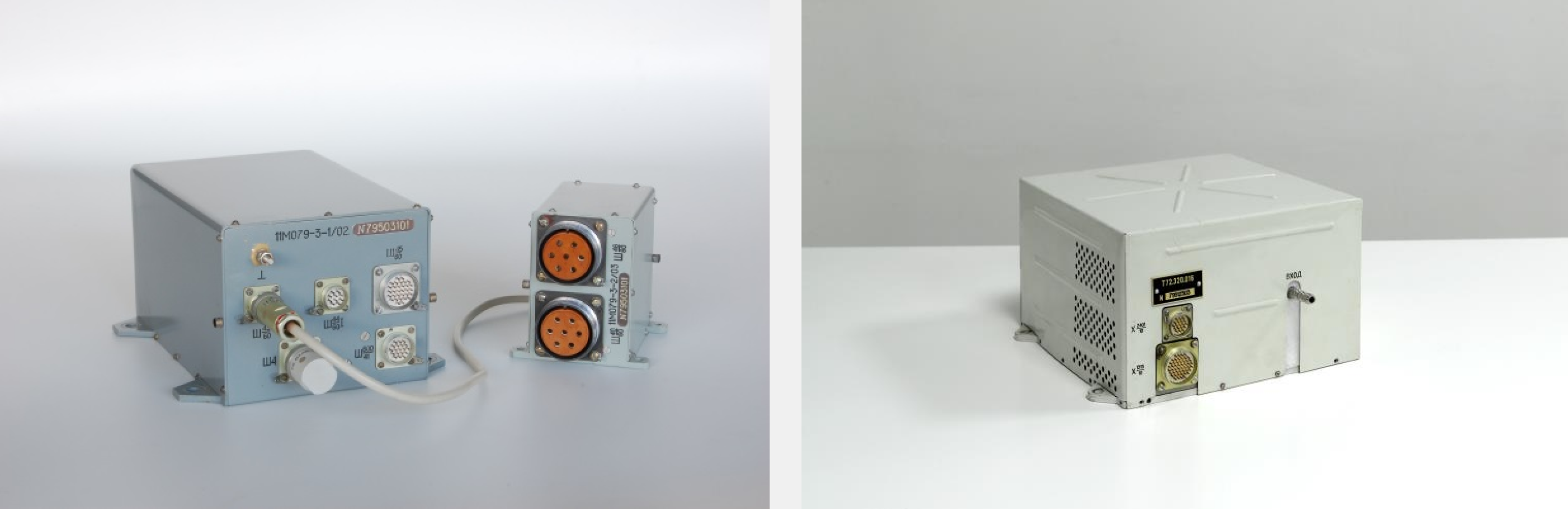
Особую важность имела разработка системы ручной стыковки космических кораблей. После срывов стыковок в 1968–1969 годах с системой «Игла» была принята мера — прекратить запуски до создания дублирующей системы с иным принципом действия. ОКБ ТК срочно разработало гамма-лучевой высотомер («Изделие 101» или «Кактус»), ставший основой новой системы «АРС-1», которая выводила на пульт космонавта данные о дальности, скорости и ориентации корабля для ручного управления стыковкой. Первый комплект «АРС-1» установили на орбитальной станции ДОС-2, но запуск 1972 года провалился из-за аварии ракеты-носителя. Специалисты ОКБ ТК оперативно нашли и обезвредили источники излучения.
Анализ существующих высотомеров малых высот показал их непригодность и необходимость срочного принципиально нового решения. Идея использования радиоактивного излучения для таких задач уже существовала, но не была реализована. За разработку взялись сотрудники лаборатории технической кибернетики.
Техническое задание на гамма-лучевой высотомер (ГЛВ), позже названный «Изделие 101» или «Кактус», было выдано предприятию п/я 651 (ОКБ-1, ныне РКК «Энергия») 23 марта 1965 года. 7 июля того же года ЛПИ и п/я 651 заключили первый договор № 435/1180 на разработку ГЛВ.

Система «АРС-1» выводила космонавту на пульт данные о дальности до станции, относительной скорости и углах ориентации. На экране в координатах «дальность – скорость» отображалась точка положения корабля и «коридор», по которому космонавт должен был управлять кораблём, чтобы вывести точку в начало координат, завершая стыковку, при этом обеспечивая нулевые относительные углы ориентации.
Первый комплект «АРС-1» был установлен на орбитальной станции ДОС23 № 2, планируемой к запуску 29 июля 1972 года.
После аварийного старта ракеты «Протон-К» со взрывом орбитального комплекса специалисты ОКБ ТК вылетели на место падения обломков и с помощью переносного дозиметра изъяли изотопные источники.
Для станции «Салют» установили рентгеновские излучатели — систему «АРС-2», которая в 1970-х часто выходила из строя. После доработок под руководством Е.И. Юревича и В.Д. Котенева система стала надёжной.
Основная система «Игла» была усовершенствована с дублирующим комплектом, но после успешных испытаний госкомиссия решила использовать её без дублеров, особенно для автоматических полётов «Прогресс». Система «АРС» обеспечила непрерывность космических программ и стала основой новых разработок ОКБ ТК.
Кроме фотонных систем для стыковки, в ОКБ ТК создали параметрические высотомеры, дистанционные измерители воздушных параметров (в том числе для сверхзвука), всепогодные системы слепой посадки и системы управления строем летательных аппаратов и морских кораблей.
Значение этих разработок и новый физический принцип фотонной техники обсуждались на научных советах Комиссии по военно-промышленным вопросам при Совете Министров СССР, расширенных коллегиях министерств и научных советах Академии наук СССР.
Фотонная техника и феномен РТК
27 июля 1973 года вышло решение ВПК № 200, где впервые это направление получило название «фотонная техника». Это решение ВПК на несколько лет определило развитие работ ОКБ ТК в этой области, включая направление поисковых НИР и разработку новых систем для конкретных заказчиков.
По сути, направление фотонной техники означало освоение диапазона электромагнитных колебаний, опережающего классическую радиотехнику на 6-7 порядков, с новыми возможностями. ВПК предусматривал строительство зданий для ОКБ ТК за счет участия министерств оборонной промышленности, с поручением Ленгорисполкому и проектным организациям. В 1973 году ОКБ ТК получило статус юридического лица и стало самостоятельным.
Помимо создания систем управления летательными аппаратами, велись теоретические и экспериментальные исследования в области фотонной техники. В 1975 году по инициативе Академии наук СССР они были обобщены в первой закрытой монографии, а в 1977 году вышли еще две. Эти исследования стали основой для прикладных научных и опытно-конструкторских работ по созданию систем измерения физических и химических параметров твердых материалов, жидкостей и газов, включая массу, скорость, фазовый и химический состав.
Начало этим разработкам было положено еще в 1971-1972 годах, например, в 1972 году для КБ «Южное» создали систему «Иней» для контроля компонентов топлива, которая увеличила дальность полета межконтинентальной ракеты на 25%.

В 1980 году ОКБ ТК получило задачу срочно разработать прибор для неконтактного измерения массового расхода и фазового состава нефти из-за миллиардных расхождений между объёмами, фиксируемыми нефтяниками и покупателями. Правительственная комиссия не выявила причину, но рекомендовала создать новый прибор.
Разработанный прибор показал, что расхождения вызваны свободными газами в нефти, однако в отечественной нефтяной промышленности продолжали использовать импортные объемные измерители.
Из-за загруженности ОКБ ТК дальнейшая разработка не велась, но группа под руководством В.А. Кратирова продолжила работу, создав перспективные системы измерения компонентов топлива и масел в авиационных баках без погрешностей при движении и без установки внутри баков.
В 1975 году по просьбе министра авиационной промышленности В.А. Казакова был создан стенд для тестирования топливоизмерительных систем с разными типами баков, показавший стабильные результаты. Министр поручил изготовить опытные образцы и провести летные испытания, что вызвало интерес авиационных и космических компаний.
Скоро после начала работ пожар уничтожил здание стенда с аппаратурой, а затем внезапно скончался В.А. Казаков — основной заказчик и финансист проекта. У ОКБ ТК не было ресурсов для восстановления, и работы по новому направлению в фотонной технике были приостановлены. Тем не менее, разработка более простых систем продолжалась. В 1978 году был создан авиационный измеритель уровня топлива, ставший основой для приборов ДУСК-86 (Ил-86, Ил-96, Ту-204), системы «Сокол-1» («Буран») и системы «Уж» (нефтехранилища).
Несмотря на это, проблемы топливоизмерительной техники в авиации и космонавтике остаются актуальными. Опыт ОКБ ТК по-прежнему востребован и может быть применён на международном уровне.
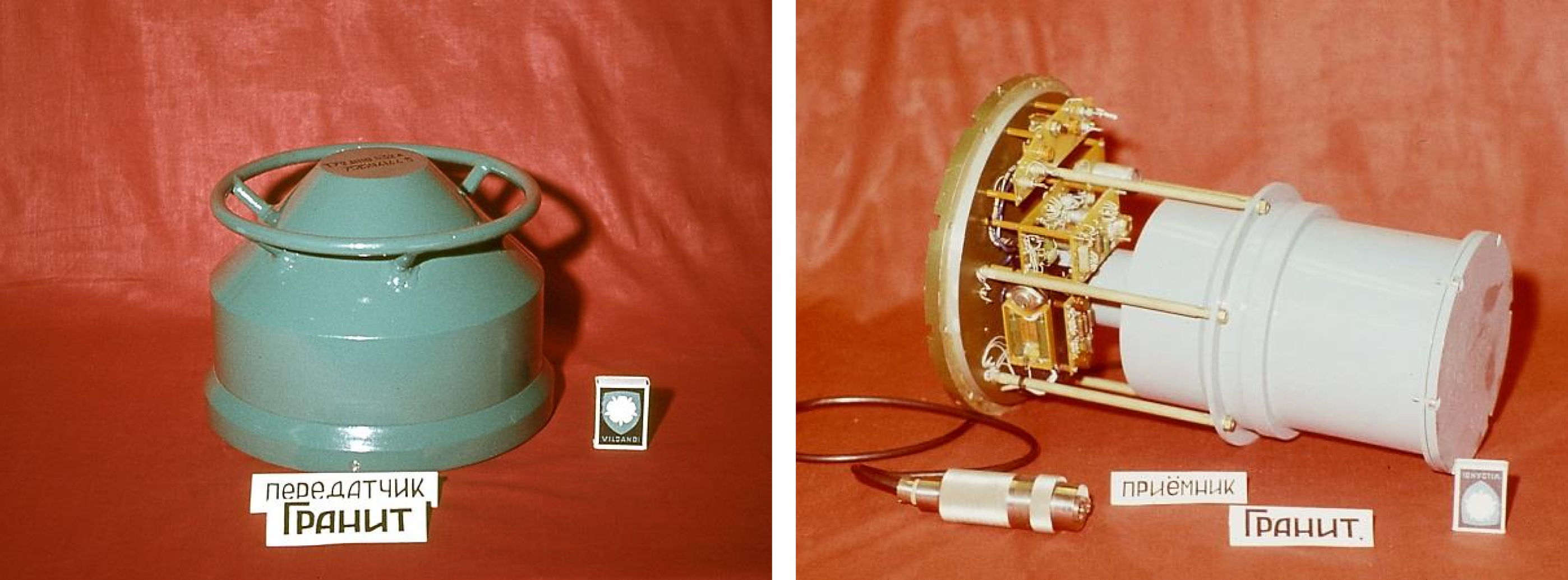
Другим прикладным направлением работ в области фотонной техники, основанным на особенностях прохождения фотонного излучения и его взаимодействия с внешней средой, стало создание систем охраны особо важных объектов и территорий. Первая такая разработка была выполнена еще в 1971 году для пограничных войск. Это была система охранной сигнализации «Гранит», предназначенная для контролирования прежде всего труднодоступных и находящихся в сложных климатических условиях участков государственной границы.
Вдоль границы устанавливались маскировочные фотонные передатчики и приемники, создавая стационарное фотонное поле, фиксировавшееся приемниками. При нарушении поля сигнал подавался, система «Гранит» была надежной и недорогой, но демонтирована после инцидента с изотопным передатчиком.
В дальнейшем развивались системы защиты ракетных стартов и активного противодействия, а также системы определения химического состава веществ, включая анализ грунта Луны и атмосферы космических станций.
Созданная система поиска ракетных головных частей с гамма-источником позволяла быстро обнаруживать цели на полигоне «Кура», что стало основой радиационного мониторинга, использовавшегося при ликвидации аварии на Чернобыле. Военные разработали систему «Зефир» для поиска источников излучения.
В ОКБ ТК сформировался стиль быстрого внедрения новых решений — «феномен ЦНИИ РТК», сочетающий инновации и оперативность. Работа охватывала задачи от космических посадок до сверхзвуковых измерений, однако развитие ограничивали устаревшие источники и электроника; появление твердотельных фотонных генераторов обещает новые возможности в области фотонной техники.
Робототехника
Исследования в области робототехники начались в ОКБ ТК параллельно с развитием фотонной техники в 1968-1969 гг. В настоящее время это основное направление в тематике организации, представленное в ее названии.
В 1968 году в Институте океанологии АН СССР создана первая система супервизорного управления манипулятором глубоководного робота «Краб-02», прошедшая морские испытания в 1971 году. Управление осуществлялось по телевизионному изображению через первую отечественную ЭВМ УМНХ, что стало первым в СССР роботом с ЭВМ-управлением. В дальнейшем в ОКБ ТК развивали подводную робототехнику, создав системы адаптивного управления для аппаратов «Катран» (1969) и серии «Манта» (1973–1977), позволяющие работать на глубинах до 6000 м и учитывать потерю видимости.

В 1960–1970-х гг. в ОКБ ТК создан первый в СССР интегральный исследовательский робот ЛПИ-1 (1969), затем сменённый ЛПИ-2 — универсальным стендом для исследований адаптивного и интеллектуального управления. ЛПИ-2 получил более 20 наград на ВДНХ и позволил разработать системы супервизорного, речевого управления, графического целеуказания и технического зрения, применённые в последующих роботах.
В июне 1971 г. в ЛПИ прошёл семинар «Роботы-манипуляторы, управляемые вычислительной машиной», собравший ведущих специалистов и представителей ГКНТ, АН СССР, ВПК и промышленности. Семинар вызвал большой резонанс и привёл к постановлению ГКНТ 1972 г. о создании промышленных роботов с назначением Е.И. Юревича (руководителя ОКБ ТК) научным руководителем.
В 1973 г. ГКНТ утвердил первый координационный план по созданию промышленных роботов, который впоследствии стал основой пятилетних программ. Постановления Совмина СССР 1974 и 1977 гг. закрепили за ОКБ ТК статус головной организации по разработке промышленных и специальных роботов. В 1978 г. Госстандарт СССР утвердил пятилетнюю программу стандартизации в робототехнике, половина документов которой была поручена ОКБ ТК.
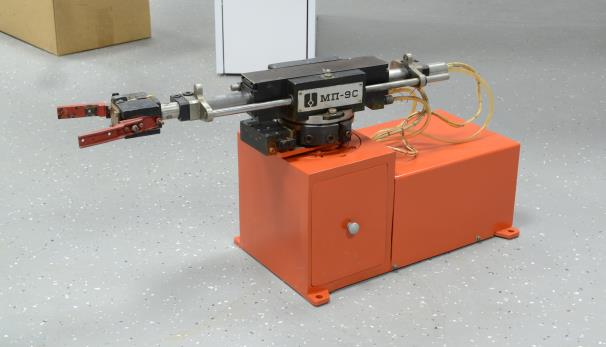
К этому времени в ОКБ ТК накоплен значительный опыт создания специальных и промышленных роботов. Разработано и внедрено более 10 типов, преимущественно на предприятиях города: подвижные роботы МП-1 для обслуживания станков, «Спрут-1» для внутрицехового транспортирования (1973), МП-3 с четырьмя манипуляторами для сборки взрывоопасных изделий, пневматические роботы МП-8 с позиционным управлением, а также массовые универсальные роботы МП-9, серийно выпускавшиеся на ВАЗ. Для них созданы перспективные системы управления, включая групповые и адаптивные, а также промышленные системы технического зрения и чувствительные захваты.
Новым направлением стали разработки систем управления бортовой энергетикой космических кораблей, начатые ещё в группе кафедры автоматики и телемеханики, предшественнице ОКБ ТК. Первым результатом стал счетчик ампер-часов (САЧ) для систем «солнечная батарея – аккумулятор», широко применявшийся на отечественных кораблях и запущенный в серийное производство на заводах «Россия» и в Чернигове. Позже создан унифицированный модульный комплект приборов контроля и управления с высоким сроком службы под руководством Н.С. Михеева и В.Г. Петрова.
Другой важной темой стали системы жизнеобеспечения и контроля герметичности космических аппаратов. Ведущие специалисты — В.И. Красов, Л.В. Малейко, В.А. Маглыш — разработали высокочувствительные системы, применяемые также при наземных испытаниях. Особое значение эти разработки получили после гибели космонавтов в 1971 году из-за разгерметизации и в связи с подготовкой стыковки «Союз» и «Аполлон». Для «Союза» была срочно создана система «Дюза» контроля аварийной разгерметизации, а для орбитальных станций «Мир» — сигнализатор давления ДСД. Опыт эксплуатации привёл к разработке унифицированного комплекса контроля давления КИД.
Под руководством Б.З. Михлина проведены перспективные НИР по системам магнитной навигации для космических кораблей («Кедр»), подводных лодок («Скат»), самолетов («Инвариант») и вертолетов («Призыв-М»). Погрешность определения координат не превышала 150–200 м. Также велись работы по спасению информации и поиску терпящих аварию летательных аппаратов.
К 1978 году ОКБ ТК отметило десятилетие, создав более 80 уникальных систем по госзаданиям, обеспечив сотни поставок и обслуживание для обороны. За достижения награждены 97 сотрудников, опубликовано множество трудов, защищено 15 диссертаций. Коллектив вырос до более тысячи человек, установлены связи с ЛПИ и 13 кафедрами, организованы семинары с участием около 6000 специалистов.
Создан информационно-консультативный пункт по робототехнике. В ЛПИ открыта кафедра технической кибернетики под руководством Е.И. Юревича — первой в стране по подготовке кадров в области робототехники.
В 1981 году ОКБ ТК переименовали в ЦНИИ РТК, завершено строительство нового корпуса. Постановлением Совмина СССР расширены функции организации как головной по разработке роботов для всех отраслей, включая стандартизацию и координацию НИОКР, а работа распространилась на страны СЭВ. Директор стал председателем совета главных конструкторов по робототехнике в СЭВ.
ЦНИИ РТК предложил принцип модульного построения робототехники, который сначала встречали скептически, но позже он получил мировое признание и был адаптирован в СССР как «агрегатно-модульное» построение.
В 1980–1982 годах в ЦНИИ РТК разработали электромеханические модули ПРЭМ34, системы управления ЕСМ и ПО СПОР. Основные разработчики — В.Г. Савин, С.В. Груздев, Е.В. Гречанов и В.А. Павлов. На их основе создали роботы ПРЭМ и унифицированные устройства ЕСМ. Позже появились пневматические модули и модели роботов, включая МП-11, выпускавшийся ВАЗом.

В дальнейшем предложенная система модулей была рекомендована странам СЭВ как основа для единой модульной системы и совместного производства. Наиболее серьёзным испытанием её эффективности стало применение при ликвидации последствий аварии на Чернобыльской АЭС.
В то время робототехника переживала разочарование: романтические ожидания универсальных роботов, способных заменить человека во всех операциях, не оправдались из-за экономической и технической невозможности. Практически применялись лишь узкоспециализированные роботы. Универсальный робот оказался нереален, учитывая разнообразие и быстро меняющиеся требования.
В ответ был разработан модульный подход: вместо универсального робота создавался универсальный набор модулей, из которых быстро собирались специализированные роботы с минимальной избыточностью и стоимостью, подобно конструктору. Это спасло идею роботизации и позволило гибко адаптироваться к задачам.
Одной из ключевых разработок ЦНИИ РТК стал комплекс бортовых манипуляторов (СБМ) для космического корабля «Буран». В отличие от модульного подхода, здесь требовался уникальный, несерийный комплекс для погрузочно-разгрузочных операций на орбите, включая работу с полезными грузами, захват свободно движущихся объектов, инспекцию и ремонт спутников совместно с космонавтами.
В основе системы лежала идея резервирования: вместо одного манипулятора с внутренним резервированием, как у американских кораблей, был создан комплекс из двух шестистепенных шарнирных манипуляторов длиной 15 м, расположенных по обеим сторонам грузового отсека, которые резервировали друг друга. В случае отказа одного второй продолжал работу, значительно расширяя функциональность. Система включала также управляющее устройство с пультом и две телекамеры со светильниками, управляемые с пульта.
Самой значимой разработкой ЦНИИ РТК в области робототехники тех лет стала система бортовых манипуляторов (СБМ) для космического корабля «Буран». Эта уникальная система, отличающаяся принципиально новым подходом, предназначена для погрузочно-разгрузочных операций на орбите, захвата и перемещения полезных грузов, а также инспекции и ремонта спутников совместно с космонавтами.
В основе СБМ — более совершенное решение по сравнению с канадским манипулятором американских многоразовых кораблей: вместо одного манипулятора создана система из двух шестистепенных шарнирных манипуляторов длиной 15 метров, расположенных по обеим сторонам грузового отсека, которые резервируют друг друга, повышая надёжность и функциональность.
Система включает два манипулятора, управляющее устройство с пультом и две телекамеры со светильниками и двумя степенями подвижности, управляемые с пульта.

Создание бортовых манипуляторов для космического корабля «Буран» было очень трудоемким, особенно изготовление и испытания в земных условиях. Для производства расширили кооперацию и организовали сборку на опытном производстве ЦНИИ РТК, что обеспечило выпуск уникальной техники высокого уровня.
Испытания усложнялись необходимостью имитации невесомости. Для этого создали два динамических стенда:
Пространственный - 70-метровая башня с подвеской на тросах для компенсации веса)
Плоскостной - пол с подвижными опорами на воздушной подушке), что позволило максимально точно воспроизвести космические условия.
Космическая робототехника, развившаяся на стыке пилотируемой и беспилотной космонавтики, расширяет возможности аппаратов и освобождает космонавтов от тяжёлой и опасной работы, способствуя созданию постоянно обитаемых станций и выполнению задач, недоступных человеку.
ЦНИИ РТК, обладая значительным научно-техническим потенциалом и опытом, занимает лидирующие позиции в стране. В 1985 году завершено строительство нового корпуса с инженерными лабораториями и опытным производством площадью около 13 тысяч кв. м, где работают свыше 1200 сотрудников. Производство оснащено современным оборудованием, а для испытаний создано уникальное оборудование.
Сформирована широкая кооперация с НИИ, КБ и заводами. Особое внимание уделено подготовке кадров: около тысячи кв. м корпуса занято учебными лабораториями с лучшими мировыми и отечественными роботами. В 1985 году создан филиал кафедры технической кибернетики для стажировок преподавателей вузов.
Первый в СССР выпуск инженеров по робототехнике состоялся в 1984 году. Для обучения созданы учебные и научно-популярные фильмы.
Таким образом, ЦНИИ РТК не только разработал уникальные космические робототехнические системы, но и создал мощную научно-производственную и учебную базу для развития отечественной робототехники.
Чернобыль
К середине 1980-х годов организация достигла зрелости и вступила в период высокой эффективности. Однако авария на Чернобыльской АЭС в апреле 1986 года резко изменила ситуацию. В первые дни после катастрофы заместитель Председателя Совета Министров СССР по топливно-энергетическому комплексу Б. Е. Щербина поручил срочно выехать на место для оценки ситуации и участия в ликвидации последствий с помощью робототехники. Задание было взято под личный контроль первым секретарём Ленинградского обкома партии Ю. Ф. Соловьевым.
К середине 1980-х годов организация достигла зрелости и вступила в период высокой эффективности. Однако авария на Чернобыльской АЭС в апреле 1986 года резко изменила ситуацию. В первые дни после катастрофы заместитель Председателя Совета Министров СССР по топливно-энергетическому комплексу Б. Е. Щербина поручил срочно выехать на место для оценки ситуации и участия в ликвидации последствий с помощью робототехники. Задание было взято под личный контроль первым секретарём Ленинградского обкома партии Ю. Ф. Соловьевым.
Роботы поставлялись спецрейсами самолетом до Киева, откуда их доставлял представитель экспедиции в Чернобыль.
В первые дни эксплуатации нового робота управление им осуществлял главный конструктор в присутствии будущего оператора. При этом выполнялись доработки, в том числе с заказом отдельных частей робота в ЦНИИ РТК. Операторы из предыдущей смены работали вместе с новыми один-два дня, передавая опыт.
Роботы поставлялись спецрейсами самолетом до Киева, откуда их доставлял представитель экспедиции в Чернобыль.
Все началось с Кактуса
Официальной датой создания Государственного научного центра ФГАУ «ЦНИИ робототехники и технической кибернетики» считается 29 января 1968 года. В этот день министр В.Н. Столетов подписал приказ №15сс о создании Особого конструкторского бюро технической кибернетики (ОКБ ТК) при Ленинградском политехническом институте им. М.И. Калинина как его подразделения.
Однако фактически история организации началась тремя годами раньше, когда в начале 1965 года на кафедре «Автоматика и телемеханика» ЛПИ (зав. кафедрой – проф. Б.И. Доманский3) была создана специальная лаборатория технической кибернетики. Возглавил лабораторию доцент Е.И. Юревич.
Одной из задач, за решение которой взялся коллектив лаборатории, было обеспечение мягкой посадки спускаемых аппаратов пилотируемых космических кораблей.
Первая система мягкой посадки на кораблях «Восход» использовала твердотопливные тормозные двигатели, включавшиеся механическим штырем, выдвигаемым вниз. Этот способ был ненадежен из-за возможного приземления на рыхлую или водную поверхность, а также влияния ветра и неровностей, что могло привести к отказу срабатывания и опасности для космонавтов.
К счастью, два полета кораблей «Восход» прошли успешно. У конструкторов появилось время для создания новой системы мягкой посадки перспективных кораблей.
Для этого необходимо было обеспечить довольно высокую точность выдачи сигнала по высоте, желательно, с поправкой на величину вертикальной составляющей скорости. Для того чтобы сформировать требуемую команду, необходимо было создать соответствующий измеритель высоты и скорости. Сложность проблемы определялась жесткими техническими требованиями.
Во-первых, необходимо было обеспечить абсолютную всепогодность. Точность работы не должна была зависеть от того, куда аппарат садится: на воду, лед, снег или твердую почву.
Во-вторых, необходимо было обеспечить нечувствительность прибора к наклонам аппарата и наличию горизонтальной составляющей скорости.
Наконец, в-третьих, требуемая система должна была удовлетворять очень жестким требованиям к надежности и массогабаритным параметрам и работать через обшивку аппарата.
Анализ существующих высотомеров малых высот и других, близких к ним измерительных средств показал, что все они непригодны, и требуется найти какое-то принципиально новое решение, причем срочно.
Идея использования для решения близких задач радиоактивного излучения к тому времени уже существовала, однако не была реализована на практике. За её воплощение и взялись сотрудники лаборатории технической кибернетики.
Техническое задание на изготовление гамма-лучевого высотомера (ГЛВ), получившего в дальнейшем наименования «Изделие 101» или «Кактус», было выдано предприятием п/я 651 (открытое наименование ОКБ-1, ныне – Публичное акционерное общество «Ракетно-космическая корпорация «Энергия» им. С.П. Королева») 23 марта 1965 года. А 7 июля того же года между кафедрой «Автоматика и телемеханика» ЛПИ и предприятием п/я 651 был заключен первый хозяйственный договор № 435/1180 на разработку ГЛВ.
Анализ существующих высотомеров малых высот и других, близких к ним измерительных средств показал, что все они непригодны, и требуется найти какое-то принципиально новое решение, причем срочно.
Идея использования для решения близких задач радиоактивного излучения к тому времени уже существовала, однако не была реализована на практике. За её воплощение и взялись сотрудники лаборатории технической кибернетики.
Техническое задание на изготовление гамма-лучевого высотомера (ГЛВ), получившего в дальнейшем наименования «Изделие 101» или «Кактус», было выдано предприятием п/я 651 (открытое наименование ОКБ-1, ныне – Публичное акционерное общество «Ракетно-космическая корпорация «Энергия» им. С.П. Королева») 23 марта 1965 года. А 7 июля того же года между кафедрой «Автоматика и телемеханика» ЛПИ и предприятием п/я 651 был заключен первый хозяйственный договор № 435/1180 на разработку ГЛВ.
Рождение ОТК ТК
Наступивший 1968 год принес много нового коллективу Е.И. Юревича. Самым важным стало преобразование НИОТК в ОКБ ТК и продолжение работ по совершенствованию системы «Кактус». К моменту юридического оформления новой организации в ней работали 127 человек. К этому времени Ленгорисполком передал для ОКБ ТК здание интерната в доме № 11 по улице Хлопина, в котором организации досталось одно крыло. Остальные площади были заняты студентами-политехниками и архивом.
Вскоре после передачи ОКБ ТК двухэтажного дома на проезде Раевского опытное производство туда переехало, но ненадолго: здание отремонтировали, а затем снесли для строительства НИИ цитологии. Чтобы не сорвать годовой план, часть сотрудников перевели в здание дачи Бенуа с коровником на углу Тихорецкого и Светлановского проспектов, где срочно запустили производственное оборудование.
В 1968 году возникла серьёзная проблема с системой «Кактус» — при испытаниях в Крыму двигатели мягкой посадки срабатывали преждевременно из-за ложных помех, что приводило к отцепке парашюта и свободному падению аппарата. Причина была быстро выявлена — нештатные помехи в цепях питания. Решение задачи на высоком уровне закрепило за ОКБ ТК репутацию эксперта по борьбе с помехами. Руководил работой Е.Н. Григорьев.
Первый успешный полёт с «Кактусом» состоялся на «Союзе-3» с космонавтом Г.Т. Береговым — мягкая посадка прошла безупречно. С тех пор «Кактус» стал штатной системой кораблей «Союз», включая современные «Союзы МС».
В те же годы на 5-м полигоне в Ленинске (Казахстан) была организована постоянная экспедиция ОКБ ТК, а в Москве — отдел для оперативной связи с полигонами.
Работа над «Кактусом» стала школой и проверкой коллектива, основанной на профессионализме и доверии с заказчиками и оборонными организациями.
Успех «Кактуса» стимулировал создание модификаций для других объектов — ОКБ-529 (В.Н. Челомей) и филиала №1 ЦНИИ ЭМ (Д.И. Козлов), где разработали систему мягкой посадки для фоторазведывательной аппаратуры.
Принципиальным шагом стало создание системы «Квант» (1968–1970 гг.) для управления двигателями автоматических лунных станций серии «Луна», доставивших лунный грунт («Луна-16») и запустивших «Луноход-1». Система отличалась рекордными массогабаритными характеристиками и работой через факел работающего двигателя. Главный конструктор А.М. Исаев предоставил стенды для испытаний и поддерживал систему на госкомиссиях. За создание «Кванта» трое сотрудников ОКБ ТК были награждены орденами.
Вскоре после передачи ОКБ ТК двухэтажного дома на проезде Раевского опытное производство туда переехало, но ненадолго: здание отремонтировали, а затем снесли для строительства НИИ цитологии. Чтобы не сорвать годовой план, часть сотрудников перевели в здание дачи Бенуа с коровником на углу Тихорецкого и Светлановского проспектов, где срочно запустили производственное оборудование.
В 1968 году возникла серьёзная проблема с системой «Кактус» — при испытаниях в Крыму двигатели мягкой посадки срабатывали преждевременно из-за ложных помех, что приводило к отцепке парашюта и свободному падению аппарата. Причина была быстро выявлена — нештатные помехи в цепях питания. Решение задачи на высоком уровне закрепило за ОКБ ТК репутацию эксперта по борьбе с помехами. Руководил работой Е.Н. Григорьев.
Первый успешный полёт с «Кактусом» состоялся на «Союзе-3» с космонавтом Г.Т. Береговым — мягкая посадка прошла безупречно. С тех пор «Кактус» стал штатной системой кораблей «Союз», включая современные «Союзы МС».
В те же годы на 5-м полигоне в Ленинске (Казахстан) была организована постоянная экспедиция ОКБ ТК, а в Москве — отдел для оперативной связи с полигонами.
Работа над «Кактусом» стала школой и проверкой коллектива, основанной на профессионализме и доверии с заказчиками и оборонными организациями.
Успех «Кактуса» стимулировал создание модификаций для других объектов — ОКБ-529 (В.Н. Челомей) и филиала №1 ЦНИИ ЭМ (Д.И. Козлов), где разработали систему мягкой посадки для фоторазведывательной аппаратуры.
Принципиальным шагом стало создание системы «Квант» (1968–1970 гг.) для управления двигателями автоматических лунных станций серии «Луна», доставивших лунный грунт («Луна-16») и запустивших «Луноход-1». Система отличалась рекордными массогабаритными характеристиками и работой через факел работающего двигателя. Главный конструктор А.М. Исаев предоставил стенды для испытаний и поддерживал систему на госкомиссиях. За создание «Кванта» трое сотрудников ОКБ ТК были награждены орденами.
Авиация также заинтересовалась «Кактусом»: для КБ А.Н. Туполева создали систему посадки беспилотного разведчика, для П.О. Сухого — систему выпуска тормозного парашюта, для М.А. Миля и Н.И. Камова — высотомеры малых высот. В военной технике появилась модификация для мягкой посадки десантируемых грузов, включая тяжёлую технику.
Авиация также заинтересовалась «Кактусом»: для КБ А.Н. Туполева создали систему посадки беспилотного разведчика, для П.О. Сухого — систему выпуска тормозного парашюта, для М.А. Миля и Н.И. Камова — высотомеры малых высот. В военной технике появилась модификация для мягкой посадки десантируемых грузов, включая тяжёлую технику.
В 1968–1970 годах разработали импульсный рентгеновский высотомер «Факел» (руководитель Ф.Л. Герчиков), успешно прошедший испытания и отличавшийся независимостью от свойств поверхности. Его использовали для измерения толщины льда в Арктике, важного для полярной авиации. На базе «Факела» прорабатывали комплексирование с радиотехническими высотомерами.
Далее появились системы управления летательными аппаратами на сверхнизких высотах: «Луч» для экранолёта Р.Е. Алексеева (1970–1971 гг.), измерявшая высоту, крен и угол атаки, и «Вал» — для определения параметров волн. Эти системы успешно испытали, но проект прекратили.
Аналогичная система «Фрегат» была создана для гидросамолётов Н.И. Камова. Позже разработали системы измерения вертикальной и горизонтальной скорости — «Рысь-К» и другие.
На базе этих разработок создали системы управления полётом крылатых ракет (Г.А. Ефремов) и дистанционные взрыватели (П.Д. Грушин, А.Г. Шипунов), включая миниатюрные лазерные взрыватели (руководители Ф.Л. Герчиков и Е.Н. Григорьев). Также была создана система «Лира» для управления индивидуальными летательными аппаратами типа «Реактивный ранец» (А.Д. Надирадзе).
Особую важность имела разработка системы ручной стыковки космических кораблей. После срывов стыковок в 1968–1969 годах с системой «Игла» была принята мера — прекратить запуски до создания дублирующей системы с иным принципом действия. ОКБ ТК срочно разработало гамма-лучевой высотомер («Изделие 101» или «Кактус»), ставший основой новой системы «АРС-1», которая выводила на пульт космонавта данные о дальности, скорости и ориентации корабля для ручного управления стыковкой. Первый комплект «АРС-1» установили на орбитальной станции ДОС-2, но запуск 1972 года провалился из-за аварии ракеты-носителя. Специалисты ОКБ ТК оперативно нашли и обезвредили источники излучения.
Анализ существующих высотомеров малых высот показал их непригодность и необходимость срочного принципиально нового решения. Идея использования радиоактивного излучения для таких задач уже существовала, но не была реализована. За разработку взялись сотрудники лаборатории технической кибернетики.
Техническое задание на гамма-лучевой высотомер (ГЛВ), позже названный «Изделие 101» или «Кактус», было выдано предприятию п/я 651 (ОКБ-1, ныне РКК «Энергия») 23 марта 1965 года. 7 июля того же года ЛПИ и п/я 651 заключили первый договор № 435/1180 на разработку ГЛВ.
Система «АРС-1» выводила космонавту на пульт данные о дальности до станции, относительной скорости и углах ориентации. На экране в координатах «дальность – скорость» отображалась точка положения корабля и «коридор», по которому космонавт должен был управлять кораблём, чтобы вывести точку в начало координат, завершая стыковку, при этом обеспечивая нулевые относительные углы ориентации.
Первый комплект «АРС-1» был установлен на орбитальной станции ДОС23 № 2, планируемой к запуску 29 июля 1972 года.
После аварийного старта ракеты «Протон-К» со взрывом орбитального комплекса специалисты ОКБ ТК вылетели на место падения обломков и с помощью переносного дозиметра изъяли изотопные источники.
Для станции «Салют» установили рентгеновские излучатели — систему «АРС-2», которая в 1970-х часто выходила из строя. После доработок под руководством Е.И. Юревича и В.Д. Котенева система стала надёжной.
Основная система «Игла» была усовершенствована с дублирующим комплектом, но после успешных испытаний госкомиссия решила использовать её без дублеров, особенно для автоматических полётов «Прогресс». Система «АРС» обеспечила непрерывность космических программ и стала основой новых разработок ОКБ ТК.
Кроме фотонных систем для стыковки, в ОКБ ТК создали параметрические высотомеры, дистанционные измерители воздушных параметров (в том числе для сверхзвука), всепогодные системы слепой посадки и системы управления строем летательных аппаратов и морских кораблей.
Значение этих разработок и новый физический принцип фотонной техники обсуждались на научных советах Комиссии по военно-промышленным вопросам при Совете Министров СССР, расширенных коллегиях министерств и научных советах Академии наук СССР.
Фотонная техника и феномен РТК
27 июля 1973 года вышло решение ВПК № 200, где впервые это направление получило название «фотонная техника». Это решение ВПК на несколько лет определило развитие работ ОКБ ТК в этой области, включая направление поисковых НИР и разработку новых систем для конкретных заказчиков.
В 1980 году ОКБ ТК получило задачу срочно разработать прибор для неконтактного измерения массового расхода и фазового состава нефти из-за миллиардных расхождений между объёмами, фиксируемыми нефтяниками и покупателями. Правительственная комиссия не выявила причину, но рекомендовала создать новый прибор.
Разработанный прибор показал, что расхождения вызваны свободными газами в нефти, однако в отечественной нефтяной промышленности продолжали использовать импортные объемные измерители.
Из-за загруженности ОКБ ТК дальнейшая разработка не велась, но группа под руководством В.А. Кратирова продолжила работу, создав перспективные системы измерения компонентов топлива и масел в авиационных баках без погрешностей при движении и без установки внутри баков.
В 1975 году по просьбе министра авиационной промышленности В.А. Казакова был создан стенд для тестирования топливоизмерительных систем с разными типами баков, показавший стабильные результаты. Министр поручил изготовить опытные образцы и провести летные испытания, что вызвало интерес авиационных и космических компаний.
По сути, направление фотонной техники означало освоение диапазона электромагнитных колебаний, опережающего классическую радиотехнику на 6-7 порядков, с новыми возможностями. ВПК предусматривал строительство зданий для ОКБ ТК за счет участия министерств оборонной промышленности, с поручением Ленгорисполкому и проектным организациям. В 1973 году ОКБ ТК получило статус юридического лица и стало самостоятельным.
Помимо создания систем управления летательными аппаратами, велись теоретические и экспериментальные исследования в области фотонной техники. В 1975 году по инициативе Академии наук СССР они были обобщены в первой закрытой монографии, а в 1977 году вышли еще две. Эти исследования стали основой для прикладных научных и опытно-конструкторских работ по созданию систем измерения физических и химических параметров твердых материалов, жидкостей и газов, включая массу, скорость, фазовый и химический состав.
Начало этим разработкам было положено еще в 1971-1972 годах, например, в 1972 году для КБ «Южное» создали систему «Иней» для контроля компонентов топлива, которая увеличила дальность полета межконтинентальной ракеты на 25%.
Вдоль границы устанавливались маскировочные фотонные передатчики и приемники, создавая стационарное фотонное поле, фиксировавшееся приемниками. При нарушении поля сигнал подавался, система «Гранит» была надежной и недорогой, но демонтирована после инцидента с изотопным передатчиком.
В дальнейшем развивались системы защиты ракетных стартов и активного противодействия, а также системы определения химического состава веществ, включая анализ грунта Луны и атмосферы космических станций.
Созданная система поиска ракетных головных частей с гамма-источником позволяла быстро обнаруживать цели на полигоне «Кура», что стало основой радиационного мониторинга, использовавшегося при ликвидации аварии на Чернобыле. Военные разработали систему «Зефир» для поиска источников излучения.
В ОКБ ТК сформировался стиль быстрого внедрения новых решений — «феномен ЦНИИ РТК», сочетающий инновации и оперативность. Работа охватывала задачи от космических посадок до сверхзвуковых измерений, однако развитие ограничивали устаревшие источники и электроника; появление твердотельных фотонных генераторов обещает новые возможности в области фотонной техники.
Робототехника
Исследования в области робототехники начались в ОКБ ТК параллельно с развитием фотонной техники в 1968-1969 гг. В настоящее время это основное направление в тематике организации, представленное в ее названии.
В 1968 году в Институте океанологии АН СССР создана первая система супервизорного управления манипулятором глубоководного робота «Краб-02», прошедшая морские испытания в 1971 году. Управление осуществлялось по телевизионному изображению через первую отечественную ЭВМ УМНХ, что стало первым в СССР роботом с ЭВМ-управлением. В дальнейшем в ОКБ ТК развивали подводную робототехнику, создав системы адаптивного управления для аппаратов «Катран» (1969) и серии «Манта» (1973–1977), позволяющие работать на глубинах до 6000 м и учитывать потерю видимости.
Все началось с Кактуса
Официальной датой создания Государственного научного центра ФГАУ «ЦНИИ робототехники и технической кибернетики» считается 29 января 1968 года. В этот день министр В.Н. Столетов подписал приказ №15сс о создании Особого конструкторского бюро технической кибернетики (ОКБ ТК) при Ленинградском политехническом институте им. М.И. Калинина как его подразделения.
Скоро после начала работ пожар уничтожил здание стенда с аппаратурой, а затем внезапно скончался В.А. Казаков — основной заказчик и финансист проекта. У ОКБ ТК не было ресурсов для восстановления, и работы по новому направлению в фотонной технике были приостановлены. Тем не менее, разработка более простых систем продолжалась. В 1978 году был создан авиационный измеритель уровня топлива, ставший основой для приборов ДУСК-86 (Ил-86, Ил-96, Ту-204), системы «Сокол-1» («Буран») и системы «Уж» (нефтехранилища).
Несмотря на это, проблемы топливоизмерительной техники в авиации и космонавтике остаются актуальными. Опыт ОКБ ТК по-прежнему востребован и может быть применён на международном уровне.
Другим прикладным направлением работ в области фотонной техники, основанным на особенностях прохождения фотонного излучения и его взаимодействия с внешней средой, стало создание систем охраны особо важных объектов и территорий. Первая такая разработка была выполнена еще в 1971 году для пограничных войск. Это была система охранной сигнализации «Гранит», предназначенная для контролирования прежде всего труднодоступных и находящихся в сложных климатических условиях участков государственной границы.
В 1960–1970-х гг. в ОКБ ТК создан первый в СССР интегральный исследовательский робот ЛПИ-1 (1969), затем сменённый ЛПИ-2 — универсальным стендом для исследований адаптивного и интеллектуального управления. ЛПИ-2 получил более 20 наград на ВДНХ и позволил разработать системы супервизорного, речевого управления, графического целеуказания и технического зрения, применённые в последующих роботах.
В июне 1971 г. в ЛПИ прошёл семинар «Роботы-манипуляторы, управляемые вычислительной машиной», собравший ведущих специалистов и представителей ГКНТ, АН СССР, ВПК и промышленности. Семинар вызвал большой резонанс и привёл к постановлению ГКНТ 1972 г. о создании промышленных роботов с назначением Е.И. Юревича (руководителя ОКБ ТК) научным руководителем.
В 1973 г. ГКНТ утвердил первый координационный план по созданию промышленных роботов, который впоследствии стал основой пятилетних программ. Постановления Совмина СССР 1974 и 1977 гг. закрепили за ОКБ ТК статус головной организации по разработке промышленных и специальных роботов. В 1978 г. Госстандарт СССР утвердил пятилетнюю программу стандартизации в робототехнике, половина документов которой была поручена ОКБ ТК.
К этому времени в ОКБ ТК накоплен значительный опыт создания специальных и промышленных роботов. Разработано и внедрено более 10 типов, преимущественно на предприятиях города: подвижные роботы МП-1 для обслуживания станков, «Спрут-1» для внутрицехового транспортирования (1973), МП-3 с четырьмя манипуляторами для сборки взрывоопасных изделий, пневматические роботы МП-8 с позиционным управлением, а также массовые универсальные роботы МП-9, серийно выпускавшиеся на ВАЗ. Для них созданы перспективные системы управления, включая групповые и адаптивные, а также промышленные системы технического зрения и чувствительные захваты.
Новым направлением стали разработки систем управления бортовой энергетикой космических кораблей, начатые ещё в группе кафедры автоматики и телемеханики, предшественнице ОКБ ТК. Первым результатом стал счетчик ампер-часов (САЧ) для систем «солнечная батарея – аккумулятор», широко применявшийся на отечественных кораблях и запущенный в серийное производство на заводах «Россия» и в Чернигове. Позже создан унифицированный модульный комплект приборов контроля и управления с высоким сроком службы под руководством Н.С. Михеева и В.Г. Петрова.
Другой важной темой стали системы жизнеобеспечения и контроля герметичности космических аппаратов. Ведущие специалисты — В.И. Красов, Л.В. Малейко, В.А. Маглыш — разработали высокочувствительные системы, применяемые также при наземных испытаниях. Особое значение эти разработки получили после гибели космонавтов в 1971 году из-за разгерметизации и в связи с подготовкой стыковки «Союз» и «Аполлон». Для «Союза» была срочно создана система «Дюза» контроля аварийной разгерметизации, а для орбитальных станций «Мир» — сигнализатор давления ДСД. Опыт эксплуатации привёл к разработке унифицированного комплекса контроля давления КИД.
Под руководством Б.З. Михлина проведены перспективные НИР по системам магнитной навигации для космических кораблей («Кедр»), подводных лодок («Скат»), самолетов («Инвариант») и вертолетов («Призыв-М»). Погрешность определения координат не превышала 150–200 м. Также велись работы по спасению информации и поиску терпящих аварию летательных аппаратов.
К 1978 году ОКБ ТК отметило десятилетие, создав более 80 уникальных систем по госзаданиям, обеспечив сотни поставок и обслуживание для обороны. За достижения награждены 97 сотрудников, опубликовано множество трудов, защищено 15 диссертаций. Коллектив вырос до более тысячи человек, установлены связи с ЛПИ и 13 кафедрами, организованы семинары с участием около 6000 специалистов.
Создан информационно-консультативный пункт по робототехнике. В ЛПИ открыта кафедра технической кибернетики под руководством Е.И. Юревича — первой в стране по подготовке кадров в области робототехники.
В 1981 году ОКБ ТК переименовали в ЦНИИ РТК, завершено строительство нового корпуса. Постановлением Совмина СССР расширены функции организации как головной по разработке роботов для всех отраслей, включая стандартизацию и координацию НИОКР, а работа распространилась на страны СЭВ. Директор стал председателем совета главных конструкторов по робототехнике в СЭВ.
ЦНИИ РТК предложил принцип модульного построения робототехники, который сначала встречали скептически, но позже он получил мировое признание и был адаптирован в СССР как «агрегатно-модульное» построение.
В 1980–1982 годах в ЦНИИ РТК разработали электромеханические модули ПРЭМ34, системы управления ЕСМ и ПО СПОР. Основные разработчики — В.Г. Савин, С.В. Груздев, Е.В. Гречанов и В.А. Павлов. На их основе создали роботы ПРЭМ и унифицированные устройства ЕСМ. Позже появились пневматические модули и модели роботов, включая МП-11, выпускавшийся ВАЗом.
В дальнейшем предложенная система модулей была рекомендована странам СЭВ как основа для единой модульной системы и совместного производства. Наиболее серьёзным испытанием её эффективности стало применение при ликвидации последствий аварии на Чернобыльской АЭС.
В то время робототехника переживала разочарование: романтические ожидания универсальных роботов, способных заменить человека во всех операциях, не оправдались из-за экономической и технической невозможности. Практически применялись лишь узкоспециализированные роботы. Универсальный робот оказался нереален, учитывая разнообразие и быстро меняющиеся требования.
В ответ был разработан модульный подход: вместо универсального робота создавался универсальный набор модулей, из которых быстро собирались специализированные роботы с минимальной избыточностью и стоимостью, подобно конструктору. Это спасло идею роботизации и позволило гибко адаптироваться к задачам.
Одной из ключевых разработок ЦНИИ РТК стал комплекс бортовых манипуляторов (СБМ) для космического корабля «Буран». В отличие от модульного подхода, здесь требовался уникальный, несерийный комплекс для погрузочно-разгрузочных операций на орбите, включая работу с полезными грузами, захват свободно движущихся объектов, инспекцию и ремонт спутников совместно с космонавтами.
В основе системы лежала идея резервирования: вместо одного манипулятора с внутренним резервированием, как у американских кораблей, был создан комплекс из двух шестистепенных шарнирных манипуляторов длиной 15 м, расположенных по обеим сторонам грузового отсека, которые резервировали друг друга. В случае отказа одного второй продолжал работу, значительно расширяя функциональность. Система включала также управляющее устройство с пультом и две телекамеры со светильниками, управляемые с пульта.
Самой значимой разработкой ЦНИИ РТК в области робототехники тех лет стала система бортовых манипуляторов (СБМ) для космического корабля «Буран». Эта уникальная система, отличающаяся принципиально новым подходом, предназначена для погрузочно-разгрузочных операций на орбите, захвата и перемещения полезных грузов, а также инспекции и ремонта спутников совместно с космонавтами.
Однако фактически история организации началась тремя годами раньше, когда в начале 1965 года на кафедре «Автоматика и телемеханика» ЛПИ (зав. кафедрой – проф. Б.И. Доманский3) была создана специальная лаборатория технической кибернетики. Возглавил лабораторию доцент Е.И. Юревич.
Одной из задач, за решение которой взялся коллектив лаборатории, было обеспечение мягкой посадки спускаемых аппаратов пилотируемых космических кораблей.
Первая система мягкой посадки на кораблях «Восход» использовала твердотопливные тормозные двигатели, включавшиеся механическим штырем, выдвигаемым вниз. Этот способ был ненадежен из-за возможного приземления на рыхлую или водную поверхность, а также влияния ветра и неровностей, что могло привести к отказу срабатывания и опасности для космонавтов.
К счастью, два полета кораблей «Восход» прошли успешно. У конструкторов появилось время для создания новой системы мягкой посадки перспективных кораблей.
Для этого необходимо было обеспечить довольно высокую точность выдачи сигнала по высоте, желательно, с поправкой на величину вертикальной составляющей скорости. Для того чтобы сформировать требуемую команду, необходимо было создать соответствующий измеритель высоты и скорости. Сложность проблемы определялась жесткими техническими требованиями.
Во-первых, необходимо было обеспечить абсолютную всепогодность. Точность работы не должна была зависеть от того, куда аппарат садится: на воду, лед, снег или твердую почву.
Во-вторых, необходимо было обеспечить нечувствительность прибора к наклонам аппарата и наличию горизонтальной составляющей скорости.
Наконец, в-третьих, требуемая система должна была удовлетворять очень жестким требованиям к надежности и массогабаритным параметрам и работать через обшивку аппарата.
Анализ существующих высотомеров малых высот показал их непригодность и необходимость срочного принципиально нового решения. Идея использования радиоактивного излучения для таких задач уже существовала, но не была реализована. За разработку взялись сотрудники лаборатории технической кибернетики.
Техническое задание на гамма-лучевой высотомер (ГЛВ), позже названный «Изделие 101» или «Кактус», было выдано предприятию п/я 651 (ОКБ-1, ныне РКК «Энергия») 23 марта 1965 года. 7 июля того же года ЛПИ и п/я 651 заключили первый договор № 435/1180 на разработку ГЛВ.

Рождение ОТК ТК
Наступивший 1968 год принес много нового коллективу Е.И. Юревича. Самым важным стало преобразование НИОТК в ОКБ ТК и продолжение работ по совершенствованию системы «Кактус». К моменту юридического оформления новой организации в ней работали 127 человек. К этому времени Ленгорисполком передал для ОКБ ТК здание интерната в доме № 11 по улице Хлопина, в котором организации досталось одно крыло. Остальные площади были заняты студентами-политехниками и архивом.
Вскоре после передачи ОКБ ТК двухэтажного дома на проезде Раевского опытное производство туда переехало, но ненадолго: здание отремонтировали, а затем снесли для строительства НИИ цитологии. Чтобы не сорвать годовой план, часть сотрудников перевели в здание дачи Бенуа с коровником на углу Тихорецкого и Светлановского проспектов, где срочно запустили производственное оборудование.
В 1968 году возникла серьёзная проблема с системой «Кактус» — при испытаниях в Крыму двигатели мягкой посадки срабатывали преждевременно из-за ложных помех, что приводило к отцепке парашюта и свободному падению аппарата. Причина была быстро выявлена — нештатные помехи в цепях питания. Решение задачи на высоком уровне закрепило за ОКБ ТК репутацию эксперта по борьбе с помехами. Руководил работой Е.Н. Григорьев.
Первый успешный полёт с «Кактусом» состоялся на «Союзе-3» с космонавтом Г.Т. Береговым — мягкая посадка прошла безупречно. С тех пор «Кактус» стал штатной системой кораблей «Союз», включая современные «Союзы МС».
В те же годы на 5-м полигоне в Ленинске (Казахстан) была организована постоянная экспедиция ОКБ ТК, а в Москве — отдел для оперативной связи с полигонами.
Работа над «Кактусом» стала школой и проверкой коллектива, основанной на профессионализме и доверии с заказчиками и оборонными организациями.
Успех «Кактуса» стимулировал создание модификаций для других объектов — ОКБ-529 (В.Н. Челомей) и филиала №1 ЦНИИ ЭМ (Д.И. Козлов), где разработали систему мягкой посадки для фоторазведывательной аппаратуры.
Принципиальным шагом стало создание системы «Квант» (1968–1970 гг.) для управления двигателями автоматических лунных станций серии «Луна», доставивших лунный грунт («Луна-16») и запустивших «Луноход-1». Система отличалась рекордными массогабаритными характеристиками и работой через факел работающего двигателя. Главный конструктор А.М. Исаев предоставил стенды для испытаний и поддерживал систему на госкомиссиях. За создание «Кванта» трое сотрудников ОКБ ТК были награждены орденами.
Авиация также заинтересовалась «Кактусом»: для КБ А.Н. Туполева создали систему посадки беспилотного разведчика, для П.О. Сухого — систему выпуска тормозного парашюта, для М.А. Миля и Н.И. Камова — высотомеры малых высот. В военной технике появилась модификация для мягкой посадки десантируемых грузов, включая тяжёлую технику.
В 1968–1970 годах разработали импульсный рентгеновский высотомер «Факел» (руководитель Ф.Л. Герчиков), успешно прошедший испытания и отличавшийся независимостью от свойств поверхности. Его использовали для измерения толщины льда в Арктике, важного для полярной авиации. На базе «Факела» прорабатывали комплексирование с радиотехническими высотомерами.
Далее появились системы управления летательными аппаратами на сверхнизких высотах: «Луч» для экранолёта Р.Е. Алексеева (1970–1971 гг.), измерявшая высоту, крен и угол атаки, и «Вал» — для определения параметров волн. Эти системы успешно испытали, но проект прекратили.
Аналогичная система «Фрегат» была создана для гидросамолётов Н.И. Камова. Позже разработали системы измерения вертикальной и горизонтальной скорости — «Рысь-К» и другие.
На базе этих разработок создали системы управления полётом крылатых ракет (Г.А. Ефремов) и дистанционные взрыватели (П.Д. Грушин, А.Г. Шипунов), включая миниатюрные лазерные взрыватели (руководители Ф.Л. Герчиков и Е.Н. Григорьев). Также была создана система «Лира» для управления индивидуальными летательными аппаратами типа «Реактивный ранец» (А.Д. Надирадзе).
Особую важность имела разработка системы ручной стыковки космических кораблей. После срывов стыковок в 1968–1969 годах с системой «Игла» была принята мера — прекратить запуски до создания дублирующей системы с иным принципом действия. ОКБ ТК срочно разработало гамма-лучевой высотомер («Изделие 101» или «Кактус»), ставший основой новой системы «АРС-1», которая выводила на пульт космонавта данные о дальности, скорости и ориентации корабля для ручного управления стыковкой. Первый комплект «АРС-1» установили на орбитальной станции ДОС-2, но запуск 1972 года провалился из-за аварии ракеты-носителя. Специалисты ОКБ ТК оперативно нашли и обезвредили источники излучения.
Анализ существующих высотомеров малых высот показал их непригодность и необходимость срочного принципиально нового решения. Идея использования радиоактивного излучения для таких задач уже существовала, но не была реализована. За разработку взялись сотрудники лаборатории технической кибернетики.
Техническое задание на гамма-лучевой высотомер (ГЛВ), позже названный «Изделие 101» или «Кактус», было выдано предприятию п/я 651 (ОКБ-1, ныне РКК «Энергия») 23 марта 1965 года. 7 июля того же года ЛПИ и п/я 651 заключили первый договор № 435/1180 на разработку ГЛВ.

В 1971 году, несмотря на запрет, в апреле и июне состоялись полёты «Союз-10» и «Союз-11» со стыковкой со станцией «Салют» — чтобы закрепить приоритет СССР в орбитальных станциях, решили рискнуть.
ОКБ ТК срочно разработало систему для ручной стыковки на случай отказа «Иглы». Были испытаны разные варианты, включая лазерную и магнитную, но выбрали гамма-излучение, как в высотомерах «Кактус», из-за надёжной элементной базы. За год создали систему «АРС-1» и поставили её для орбитальной станции.
Техническое задание на изготовление гамма-лучевого высотомера (ГЛВ), получившего в дальнейшем наименования «Изделие 101» или «Кактус», было выдано предприятием п/я 651 (открытое наименование ОКБ-1, ныне – Публичное акционерное общество «Ракетно-космическая корпорация «Энергия» им. С.П. Королева») 23 марта 1965 года. А 7 июля того же года между кафедрой «Автоматика и телемеханика» ЛПИ и предприятием п/я 651 был заключен первый хозяйственный договор № 435/1180 на разработку ГЛВ.

Система «АРС-1» выводила космонавту на пульт данные о дальности до станции, относительной скорости и углах ориентации. На экране в координатах «дальность – скорость» отображалась точка положения корабля и «коридор», по которому космонавт должен был управлять кораблём, чтобы вывести точку в начало координат, завершая стыковку, при этом обеспечивая нулевые относительные углы ориентации.
Первый комплект «АРС-1» был установлен на орбитальной станции ДОС23 № 2, планируемой к запуску 29 июля 1972 года.
После аварийного старта ракеты «Протон-К» со взрывом орбитального комплекса специалисты ОКБ ТК вылетели на место падения обломков и с помощью переносного дозиметра изъяли изотопные источники.
Для станции «Салют» установили рентгеновские излучатели — систему «АРС-2», которая в 1970-х часто выходила из строя. После доработок под руководством Е.И. Юревича и В.Д. Котенева система стала надёжной.
Основная система «Игла» была усовершенствована с дублирующим комплектом, но после успешных испытаний госкомиссия решила использовать её без дублеров, особенно для автоматических полётов «Прогресс». Система «АРС» обеспечила непрерывность космических программ и стала основой новых разработок ОКБ ТК.
Кроме фотонных систем для стыковки, в ОКБ ТК создали параметрические высотомеры, дистанционные измерители воздушных параметров (в том числе для сверхзвука), всепогодные системы слепой посадки и системы управления строем летательных аппаратов и морских кораблей.
Значение этих разработок и новый физический принцип фотонной техники обсуждались на научных советах Комиссии по военно-промышленным вопросам при Совете Министров СССР, расширенных коллегиях министерств и научных советах Академии наук СССР.
Фотонная техника и феномен РТК
27 июля 1973 года вышло решение ВПК № 200, где впервые это направление получило название «фотонная техника». Это решение ВПК на несколько лет определило развитие работ ОКБ ТК в этой области, включая направление поисковых НИР и разработку новых систем для конкретных заказчиков.
По сути, направление фотонной техники означало освоение диапазона электромагнитных колебаний, опережающего классическую радиотехнику на 6-7 порядков, с новыми возможностями. ВПК предусматривал строительство зданий для ОКБ ТК за счет участия министерств оборонной промышленности, с поручением Ленгорисполкому и проектным организациям. В 1973 году ОКБ ТК получило статус юридического лица и стало самостоятельным.
Помимо создания систем управления летательными аппаратами, велись теоретические и экспериментальные исследования в области фотонной техники. В 1975 году по инициативе Академии наук СССР они были обобщены в первой закрытой монографии, а в 1977 году вышли еще две. Эти исследования стали основой для прикладных научных и опытно-конструкторских работ по созданию систем измерения физических и химических параметров твердых материалов, жидкостей и газов, включая массу, скорость, фазовый и химический состав.
Начало этим разработкам было положено еще в 1971-1972 годах, например, в 1972 году для КБ «Южное» создали систему «Иней» для контроля компонентов топлива, которая увеличила дальность полета межконтинентальной ракеты на 25%.

В 1980 году ОКБ ТК получило задачу срочно разработать прибор для неконтактного измерения массового расхода и фазового состава нефти из-за миллиардных расхождений между объёмами, фиксируемыми нефтяниками и покупателями. Правительственная комиссия не выявила причину, но рекомендовала создать новый прибор.
Разработанный прибор показал, что расхождения вызваны свободными газами в нефти, однако в отечественной нефтяной промышленности продолжали использовать импортные объемные измерители.
Из-за загруженности ОКБ ТК дальнейшая разработка не велась, но группа под руководством В.А. Кратирова продолжила работу, создав перспективные системы измерения компонентов топлива и масел в авиационных баках без погрешностей при движении и без установки внутри баков.
В 1975 году по просьбе министра авиационной промышленности В.А. Казакова был создан стенд для тестирования топливоизмерительных систем с разными типами баков, показавший стабильные результаты. Министр поручил изготовить опытные образцы и провести летные испытания, что вызвало интерес авиационных и космических компаний.
Скоро после начала работ пожар уничтожил здание стенда с аппаратурой, а затем внезапно скончался В.А. Казаков — основной заказчик и финансист проекта. У ОКБ ТК не было ресурсов для восстановления, и работы по новому направлению в фотонной технике были приостановлены. Тем не менее, разработка более простых систем продолжалась. В 1978 году был создан авиационный измеритель уровня топлива, ставший основой для приборов ДУСК-86 (Ил-86, Ил-96, Ту-204), системы «Сокол-1» («Буран») и системы «Уж» (нефтехранилища).
Несмотря на это, проблемы топливоизмерительной техники в авиации и космонавтике остаются актуальными. Опыт ОКБ ТК по-прежнему востребован и может быть применён на международном уровне.
Другим прикладным направлением работ в области фотонной техники, основанным на особенностях прохождения фотонного излучения и его взаимодействия с внешней средой, стало создание систем охраны особо важных объектов и территорий. Первая такая разработка была выполнена еще в 1971 году для пограничных войск. Это была система охранной сигнализации «Гранит», предназначенная для контролирования прежде всего труднодоступных и находящихся в сложных климатических условиях участков государственной границы.
Вдоль границы устанавливались маскировочные фотонные передатчики и приемники, создавая стационарное фотонное поле, фиксировавшееся приемниками. При нарушении поля сигнал подавался, система «Гранит» была надежной и недорогой, но демонтирована после инцидента с изотопным передатчиком.
В дальнейшем развивались системы защиты ракетных стартов и активного противодействия, а также системы определения химического состава веществ, включая анализ грунта Луны и атмосферы космических станций.
Созданная система поиска ракетных головных частей с гамма-источником позволяла быстро обнаруживать цели на полигоне «Кура», что стало основой радиационного мониторинга, использовавшегося при ликвидации аварии на Чернобыле. Военные разработали систему «Зефир» для поиска источников излучения.
В ОКБ ТК сформировался стиль быстрого внедрения новых решений — «феномен ЦНИИ РТК», сочетающий инновации и оперативность. Работа охватывала задачи от космических посадок до сверхзвуковых измерений, однако развитие ограничивали устаревшие источники и электроника; появление твердотельных фотонных генераторов обещает новые возможности в области фотонной техники.
Робототехника
Исследования в области робототехники начались в ОКБ ТК параллельно с развитием фотонной техники в 1968-1969 гг. В настоящее время это основное направление в тематике организации, представленное в ее названии.
В 1968 году в Институте океанологии АН СССР создана первая система супервизорного управления манипулятором глубоководного робота «Краб-02», прошедшая морские испытания в 1971 году. Управление осуществлялось по телевизионному изображению через первую отечественную ЭВМ УМНХ, что стало первым в СССР роботом с ЭВМ-управлением. В дальнейшем в ОКБ ТК развивали подводную робототехнику, создав системы адаптивного управления для аппаратов «Катран» (1969) и серии «Манта» (1973–1977), позволяющие работать на глубинах до 6000 м и учитывать потерю видимости.
В 1960–1970-х гг. в ОКБ ТК создан первый в СССР интегральный исследовательский робот ЛПИ-1 (1969), затем сменённый ЛПИ-2 — универсальным стендом для исследований адаптивного и интеллектуального управления. ЛПИ-2 получил более 20 наград на ВДНХ и позволил разработать системы супервизорного, речевого управления, графического целеуказания и технического зрения, применённые в последующих роботах.
В июне 1971 г. в ЛПИ прошёл семинар «Роботы-манипуляторы, управляемые вычислительной машиной», собравший ведущих специалистов и представителей ГКНТ, АН СССР, ВПК и промышленности. Семинар вызвал большой резонанс и привёл к постановлению ГКНТ 1972 г. о создании промышленных роботов с назначением Е.И. Юревича (руководителя ОКБ ТК) научным руководителем.
В 1973 г. ГКНТ утвердил первый координационный план по созданию промышленных роботов, который впоследствии стал основой пятилетних программ. Постановления Совмина СССР 1974 и 1977 гг. закрепили за ОКБ ТК статус головной организации по разработке промышленных и специальных роботов. В 1978 г. Госстандарт СССР утвердил пятилетнюю программу стандартизации в робототехнике, половина документов которой была поручена ОКБ ТК.
К этому времени в ОКБ ТК накоплен значительный опыт создания специальных и промышленных роботов. Разработано и внедрено более 10 типов, преимущественно на предприятиях города: подвижные роботы МП-1 для обслуживания станков, «Спрут-1» для внутрицехового транспортирования (1973), МП-3 с четырьмя манипуляторами для сборки взрывоопасных изделий, пневматические роботы МП-8 с позиционным управлением, а также массовые универсальные роботы МП-9, серийно выпускавшиеся на ВАЗ. Для них созданы перспективные системы управления, включая групповые и адаптивные, а также промышленные системы технического зрения и чувствительные захваты.

Одновременно с развитием двух основных для ОКБ ТК направлений – фотонной техники и робототехники шел непрерывный научный поиск новых идей в других направлениях науки и техники, в основном в связи с предложениями и просьбами традиционных заказчиков ОКБ ТК. В результате постепенно стали формироваться новые тематические направления, разработки по некоторым из них были доведены до штатных поставок и получили существенное распространение.
Новым направлением стали разработки систем управления бортовой энергетикой космических кораблей, начатые ещё в группе кафедры автоматики и телемеханики, предшественнице ОКБ ТК. Первым результатом стал счетчик ампер-часов (САЧ) для систем «солнечная батарея – аккумулятор», широко применявшийся на отечественных кораблях и запущенный в серийное производство на заводах «Россия» и в Чернигове. Позже создан унифицированный модульный комплект приборов контроля и управления с высоким сроком службы под руководством Н.С. Михеева и В.Г. Петрова.
Другой важной темой стали системы жизнеобеспечения и контроля герметичности космических аппаратов. Ведущие специалисты — В.И. Красов, Л.В. Малейко, В.А. Маглыш — разработали высокочувствительные системы, применяемые также при наземных испытаниях. Особое значение эти разработки получили после гибели космонавтов в 1971 году из-за разгерметизации и в связи с подготовкой стыковки «Союз» и «Аполлон». Для «Союза» была срочно создана система «Дюза» контроля аварийной разгерметизации, а для орбитальных станций «Мир» — сигнализатор давления ДСД. Опыт эксплуатации привёл к разработке унифицированного комплекса контроля давления КИД.
Под руководством Б.З. Михлина проведены перспективные НИР по системам магнитной навигации для космических кораблей («Кедр»), подводных лодок («Скат»), самолетов («Инвариант») и вертолетов («Призыв-М»). Погрешность определения координат не превышала 150–200 м. Также велись работы по спасению информации и поиску терпящих аварию летательных аппаратов.
К 1978 году ОКБ ТК отметило десятилетие, создав более 80 уникальных систем по госзаданиям, обеспечив сотни поставок и обслуживание для обороны. За достижения награждены 97 сотрудников, опубликовано множество трудов, защищено 15 диссертаций. Коллектив вырос до более тысячи человек, установлены связи с ЛПИ и 13 кафедрами, организованы семинары с участием около 6000 специалистов.
Создан информационно-консультативный пункт по робототехнике. В ЛПИ открыта кафедра технической кибернетики под руководством Е.И. Юревича — первой в стране по подготовке кадров в области робототехники.
В 1981 году ОКБ ТК переименовали в ЦНИИ РТК, завершено строительство нового корпуса. Постановлением Совмина СССР расширены функции организации как головной по разработке роботов для всех отраслей, включая стандартизацию и координацию НИОКР, а работа распространилась на страны СЭВ. Директор стал председателем совета главных конструкторов по робототехнике в СЭВ.

ЦНИИ РТК предложил принцип модульного построения робототехники, который сначала встречали скептически, но позже он получил мировое признание и был адаптирован в СССР как «агрегатно-модульное» построение.
В 1980–1982 годах в ЦНИИ РТК разработали электромеханические модули ПРЭМ34, системы управления ЕСМ и ПО СПОР. Основные разработчики — В.Г. Савин, С.В. Груздев, Е.В. Гречанов и В.А. Павлов. На их основе создали роботы ПРЭМ и унифицированные устройства ЕСМ. Позже появились пневматические модули и модели роботов, включая МП-11, выпускавшийся ВАЗом.
В основе СБМ — более совершенное решение по сравнению с канадским манипулятором американских многоразовых кораблей: вместо одного манипулятора создана система из двух шестистепенных шарнирных манипуляторов длиной 15 метров, расположенных по обеим сторонам грузового отсека, которые резервируют друг друга, повышая надёжность и функциональность.
Система включает два манипулятора, управляющее устройство с пультом и две телекамеры со светильниками и двумя степенями подвижности, управляемые с пульта.

Создание бортовых манипуляторов для космического корабля «Буран» было очень трудоемким, особенно изготовление и испытания в земных условиях. Для производства расширили кооперацию и организовали сборку на опытном производстве ЦНИИ РТК, что обеспечило выпуск уникальной техники высокого уровня.
Испытания усложнялись необходимостью имитации невесомости. Для этого создали два динамических стенда:
Пространственный - 70-метровая башня с подвеской на тросах для компенсации веса)
Плоскостной - пол с подвижными опорами на воздушной подушке), что позволило максимально точно воспроизвести космические условия.
Космическая робототехника, развившаяся на стыке пилотируемой и беспилотной космонавтики, расширяет возможности аппаратов и освобождает космонавтов от тяжёлой и опасной работы, способствуя созданию постоянно обитаемых станций и выполнению задач, недоступных человеку.
ЦНИИ РТК, обладая значительным научно-техническим потенциалом и опытом, занимает лидирующие позиции в стране. В 1985 году завершено строительство нового корпуса с инженерными лабораториями и опытным производством площадью около 13 тысяч кв. м, где работают свыше 1200 сотрудников. Производство оснащено современным оборудованием, а для испытаний создано уникальное оборудование.
Сформирована широкая кооперация с НИИ, КБ и заводами. Особое внимание уделено подготовке кадров: около тысячи кв. м корпуса занято учебными лабораториями с лучшими мировыми и отечественными роботами. В 1985 году создан филиал кафедры технической кибернетики для стажировок преподавателей вузов.
Первый в СССР выпуск инженеров по робототехнике состоялся в 1984 году. Для обучения созданы учебные и научно-популярные фильмы.
Таким образом, ЦНИИ РТК не только разработал уникальные космические робототехнические системы, но и создал мощную научно-производственную и учебную базу для развития отечественной робототехники.
Чернобыль
К середине 1980-х годов организация достигла зрелости и вступила в период высокой эффективности. Однако авария на Чернобыльской АЭС в апреле 1986 года резко изменила ситуацию. В первые дни после катастрофы заместитель Председателя Совета Министров СССР по топливно-энергетическому комплексу Б. Е. Щербина поручил срочно выехать на место для оценки ситуации и участия в ликвидации последствий с помощью робототехники. Задание было взято под личный контроль первым секретарём Ленинградского обкома партии Ю. Ф. Соловьевым.
К середине 1980-х годов организация достигла зрелости и вступила в период высокой эффективности. Однако авария на Чернобыльской АЭС в апреле 1986 года резко изменила ситуацию. В первые дни после катастрофы заместитель Председателя Совета Министров СССР по топливно-энергетическому комплексу Б. Е. Щербина поручил срочно выехать на место для оценки ситуации и участия в ликвидации последствий с помощью робототехники. Задание было взято под личный контроль первым секретарём Ленинградского обкома партии Ю. Ф. Соловьевым.
Роботы поставлялись спецрейсами самолетом до Киева, откуда их доставлял представитель экспедиции в Чернобыль.
В первые дни эксплуатации нового робота управление им осуществлял главный конструктор в присутствии будущего оператора. При этом выполнялись доработки, в том числе с заказом отдельных частей робота в ЦНИИ РТК. Операторы из предыдущей смены работали вместе с новыми один-два дня, передавая опыт.
Роботы поставлялись спецрейсами самолетом до Киева, откуда их доставлял представитель экспедиции в Чернобыль.
Создание бортовых манипуляторов для космического корабля «Буран» было очень трудоемким, особенно изготовление и испытания в земных условиях. Для производства расширили кооперацию и организовали сборку на опытном производстве ЦНИИ РТК, что обеспечило выпуск уникальной техники высокого уровня.
Испытания усложнялись необходимостью имитации невесомости. Для этого создали два динамических стенда:
- Пространственный - 70-метровая башня с подвеской на тросах для компенсации веса)
- Плоскостной - пол с подвижными опорами на воздушной подушке), что позволило максимально точно воспроизвести космические условия.
ЦНИИ РТК, обладая значительным научно-техническим потенциалом и опытом, занимает лидирующие позиции в стране. В 1985 году завершено строительство нового корпуса с инженерными лабораториями и опытным производством площадью около 13 тысяч кв. м, где работают свыше 1200 сотрудников. Производство оснащено современным оборудованием, а для испытаний создано уникальное оборудование.
Сформирована широкая кооперация с НИИ, КБ и заводами. Особое внимание уделено подготовке кадров: около тысячи кв. м корпуса занято учебными лабораториями с лучшими мировыми и отечественными роботами. В 1985 году создан филиал кафедры технической кибернетики для стажировок преподавателей вузов.
Первый в СССР выпуск инженеров по робототехнике состоялся в 1984 году. Для обучения созданы учебные и научно-популярные фильмы.
Таким образом, ЦНИИ РТК не только разработал уникальные космические робототехнические системы, но и создал мощную научно-производственную и учебную базу для развития отечественной робототехники.
Чернобыль
К середине 1980-х годов организация достигла зрелости и вступила в период высокой эффективности. Однако авария на Чернобыльской АЭС в апреле 1986 года резко изменила ситуацию. В первые дни после катастрофы заместитель Председателя Совета Министров СССР по топливно-энергетическому комплексу Б. Е. Щербина поручил срочно выехать на место для оценки ситуации и участия в ликвидации последствий с помощью робототехники. Задание было взято под личный контроль первым секретарём Ленинградского обкома партии Ю. Ф. Соловьевым.
Модульный принцип конструирования роботов позволил за два месяца разработать и поставить на Чернобыльскую АЭС более 15 моделей, собранных из унифицированных модулей. Среди них — первые в СССР дистанционно управляемые разведчики (колесные РР-1, РР-2, РР-3 и гусеничные РР-Г1, РР-Г2) с телевизионными камерами, гамма-локаторами и дозиметрами, работавшие при дозах до 20 тысяч рентген в час. Также поставлены тяжелые роботы: подборщик РП, транспортные ТР-А1 и ТР-Б1 с ковшом для грузов до 150 кг, а также бульдозеры ТР-А2, ТР-Г1, ТР-Г2.
Для производства модулей создана кооперация из около 40 предприятий 11 министерств. В ЦНИИ РТК сформировали 15 временных групп, организовав круглосуточную работу в две смены по 12 часов. Все вопросы решались по телефону; переписка и совещания были запрещены.
Работа на станции велась экспедициями по 15–20 добровольцев с собственным транспортом. За период с июня 1986 по апрель 1987 прошло 10 смен. Участники жили в бывшем детском саду в Чернобыле, роботы обслуживались на острове Припяти в цехе судоремонтной базы. Вход и выход контролировались дозиметрией, дезактивацией одежды и транспорта, включая обязательную смену одежды.
Разработка роботов строилась по требованиям главного конструктора: он уточнял задачи и передавал данные разработчикам ЦНИИ РТК по телефону. После обсуждений принимались решения и определялись сроки поставки. В экстремальных условиях инициативность и ответственность сотрудников были ключевыми факторами успеха проекта.
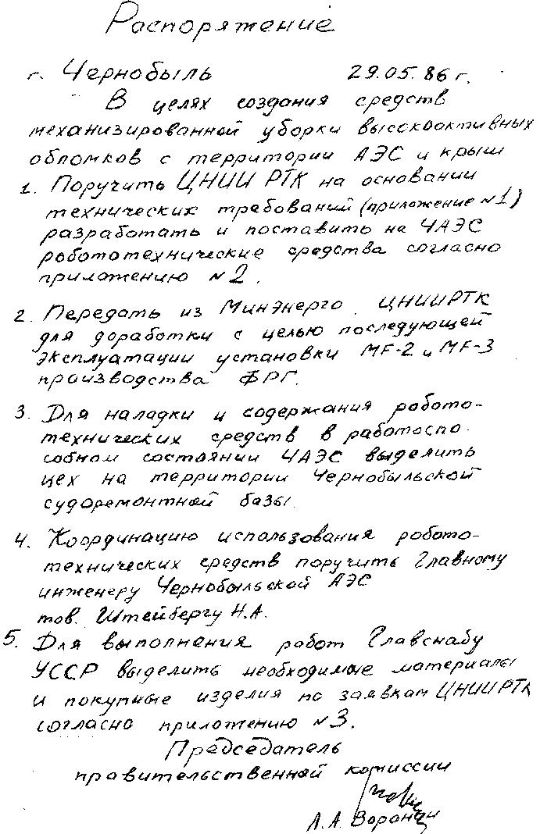
В первые дни эксплуатации нового робота управление им осуществлял главный конструктор в присутствии будущего оператора. При этом выполнялись доработки, в том числе с заказом отдельных частей робота в ЦНИИ РТК. Операторы из предыдущей смены работали вместе с новыми один-два дня, передавая опыт.
Работа роботов документировалась с помощью видеомагнитофонов.
Работы ЦНИИ РТК на ЧАЭС развивались следующим образом: в начале мая 1986 года руководство Ленинградского обкома партии предупредило о необходимости включения организации в работы на станции. Срочно на станцию были направлены В.Н. Николаев и В.Н. Барковский, которые после возвращения рассказали о положении дел и возможностях использования роботов для обследования помещений и снятия дозных полей.
17 мая Б.Е. Щербина вызвал директора–главного конструктора ЦНИИ РТК в Москву и сообщил, что организация включена в проект постановления ЦК КПСС и Совета Министров СССР по работам в районе ЧАЭС по робототехнике. Ввиду срочности было приказано немедленно ехать на ЧАЭС для определения функций совместно с председателем Государственной комиссии. Уже 29 мая в Чернобыле вышло распоряжение председателя комиссии — заместителя Председателя Совета Министров СССР Л.А. Воронина — с заданием для ЦНИИ РТК и порядком его выполнения.
Работа роботов документировалась с помощью видеомагнитофонов.
Работы ЦНИИ РТК на ЧАЭС развивались следующим образом: в начале мая 1986 года руководство Ленинградского обкома партии предупредило о необходимости включения организации в работы на станции. Срочно на станцию были направлены В.Н. Николаев и В.Н. Барковский, которые после возвращения рассказали о положении дел и возможностях использования роботов для обследования помещений и снятия дозных полей.
Работа роботов документировалась с помощью видеомагнитофонов.
Работы ЦНИИ РТК на ЧАЭС развивались следующим образом: в начале мая 1986 года руководство Ленинградского обкома партии предупредило о необходимости включения организации в работы на станции. Срочно на станцию были направлены В.Н. Николаев и В.Н. Барковский, которые после возвращения рассказали о положении дел и возможностях использования роботов для обследования помещений и снятия дозных полей.
17 мая Б.Е. Щербина вызвал директора–главного конструктора ЦНИИ РТК в Москву и сообщил, что организация включена в проект постановления ЦК КПСС и Совета Министров СССР по работам в районе ЧАЭС по робототехнике. Ввиду срочности было приказано немедленно ехать на ЧАЭС для определения функций совместно с председателем Государственной комиссии. Уже 29 мая в Чернобыле вышло распоряжение председателя комиссии — заместителя Председателя Совета Министров СССР Л.А. Воронина — с заданием для ЦНИИ РТК и порядком его выполнения.
В нем ЦНИИ РТК поручалось до 15 июня поставить на ЧАЭС первые четыре экспериментальных образца роботов для испытаний в условиях станции и окончательного выбора основных технических решений, включая типы шасси, системы энергопитания и управления. До 1 июля необходимо было осуществить поставку пяти штатных роботов для их использования на станции. Уникальная особенность этого распоряжения и для подписавшего его заместителя Председателя Совета Министров СССР Л.А. Воронина, заключалась в том, что оно было написано от руки.
В дальнейшем использование роботов ЦНИИ РТК задавалось отдельными программами работ или решениями Правительственной комиссии. Результаты работ оформлялись актами, утвержденными руководством ЧАЭС. Первичными документами для этих актов, в свою очередь, служили совместные акты исполнителей работ от ЦНИИ РТК и представителей Министерства обороны, также утверждаемые ответственным лицом от ЧАЭС.
Позднее в связи с расширением объемов работ, выполняемых роботами, в практику вошли ежемесячные справки-отчеты руководства ЧАСЭС Государственной комиссии о работах роботов ЦНИИ РТК. Отдельно работа ЦНИИ РТК оценивалась еще и военными.

Со временем задания на работы с роботами стали оформлять в виде сводного плана, утверждаемого председателем правительственной комиссии — заместителем Председателя Совета Министров СССР. Первый такой план на июль 1986 года утвердил В.К. Гусев. Решением комиссии от 20 июля задачи ЦНИИ РТК ограничили роботами-разведчиками, а тяжелые роботы, в том числе для очистки кровли, поручили ВНИИтрансмашу и Институту физико-технических проблем. ЦНИИ РТК должны были передать этим организациям телевизионные радиосистемы и шасси тяжелых роботов, изготовленных Пролетарским заводом.
Тем не менее, почти все работы на станции выполнили роботы ЦНИИ РТК. Кроме них, на станцию доставили два срочно закупленных в ФРГ тяжелых радиоуправляемых робота MF-2 и MF-3, роботов «Белоярец» ПО «Атомэнергоремонт», два робота СТР ВНИИтрансмаша и робот МВТУ-2. Все они, кроме роботов СТР, вышли из строя и не успели выполнить значимых задач.
У немецких роботов под действием ионизирующих излучений отказала электроника. Один из них, например, был доставлен вертолетом на кровлю вблизи вентиляционной трубы для очистки ее совместно с роботом ЦНИИ РТК. Ночью он самопроизвольно включился, двинулся в сторону трубы и, уткнувшись в нее, забуксовал, пока не сломалась трансмиссия. Снимать его пришлось солдатам при помощи лебедок. Немного поработали на кровле только роботы СТР. Один из них смог добраться до самой верхней отметки на крыше у вытяжной трубы, но там у него отказали приводы. Он был также вытащен лебедкой, а затем снят с помощью установленного у третьего блока станции подъемного крана.
Что касается роботов-разведчиков, то этого типа роботы поставлялись только ЦНИИ РТК. Один из первых таких роботов был запущен прямо под взорвавшийся четвертый энергоблок. Робот передавал оттуда информацию почти сутки, затем «ослеп» и потерял управляемость.

Согласно официальным актам, сотрудники ЦНИИ РТК с помощью роботов выполнили на ЧАЭС:
- обследование более 10 тысяч м² помещений, кровли зданий и территории с составлением карт дозных полей и видеосъемкой;
- очистку свыше 4 тысяч м² кровли с сбросом радиоактивного мусора в провал на месте взрыва энергоблока;
- очистку 600 м² сильно загрязненной территории — иловых полей.
Несмотря на положительные оценки, руководство ЦНИИ РТК сталкивалось с недоброжелательством конкурентов, рассчитывавших на финансирование новых работ по «экстремальной робототехнике» — направлению, возникшему благодаря ликвидации аварии и ставшему сегодня ведущим в области искусственного интеллекта и креативных технологий.
Второе направление работ ЦНИИ РТК — обследование дозной обстановки в 30-километровой зоне и вокруг ЧАЭС с использованием систем «Зефир» (воздушный мониторинг), «Изъятие» (наземный мониторинг) и гамма-локатора. В сентябре 1986 года с помощью аппаратуры «Зефир-М» обследовали 250 км² территории, 93 населенных пункта и 6 дорог. После завершения работ разработки продолжались по заказам химических войск и АЭС под руководством И.Н. Коробкова.
На рубеже эпох
Со завершением экспедиций в Чернобыль можно было вернуться к плановым исследованиям, в том числе к созданию аппаратуры «Орион» для системы мягкой посадки на спутник Марса Фобос, разработанной в НПО им. Лавочкина (Корнеев, Попов, Воробьев, Дудин, Спасский). Основой системы — импульсный рентгеновский высотомер нового поколения. Космическое путешествие закончилось неудачей, но это произошло до истечения срока работы «Ориона».
В период с конца 1980-х до конца 1990-х годов ЦНИИ РТК прошёл через сложную трансформацию из-за политических и экономических изменений в стране. После ухода основателя Е.И. Юревича и прихода директора В.М. Николаева институт столкнулся с ослаблением государственной поддержки и переходом к рыночным механизмам.
Несмотря на трудности, были построены современные лаборатории и испытательные стенды, что позволило продолжить работы по космическим манипуляторам для программы «Буран». Однако финансовая нестабильность и появление «параллельных структур» привели к оттоку кадров и снижению научного потенциала.
С приходом в 1991 году директора В.А. Лопоты институт начал активную перестройку, сделав ставку на информационные технологии, международное сотрудничество и внешнеэкономическую деятельность. Были реализованы проекты с Китаем, Европой и Японией, а институт получил статус Государственного научного центра РФ, что повысило престиж и финансирование.
В этот период развивались направления робототехники, технической кибернетики и космических технологий, включая создание космического робота «Циркуль» и стенда имитации невесомости. Внедрение информационной инфраструктуры и выход в интернет расширили международные связи и повысили эффективность работы.
В конце 1990-х годов ЦНИИ РТК занялся разработкой систем противодействия терроризму, создав антитеррористического робота и совместно с ФСБ открыл Центр микроробототехники и технической кибернетики. Несмотря на сложности, институт сохранил научный потенциал и занял ведущие позиции в России и на международной арене.

На рубеже тысячелетий космическое приборостроение получило новый импульс. В 1998 году на орбитальном комплексе «Мир» испытали комплекс «Индикатор» для измерения параметров разреженной атмосферы.
Аппаратура появилась вовремя после разгерметизации модуля «Спектр» в 1997 году из-за столкновения с грузовиком «Прогресс М-34». В.А. Лопота вошёл в международную комиссию по безопасности МКС.
По результатам аварии в ЦНИИ РТК создали переносной индикатор мест разгерметизации для МКС, который сейчас является штатным оборудованием станции.
В начале третьего тысячелетия ЦНИИ РТК возобновил работы благодаря улучшению экономики. По заказу РКК «Энергия» создана система контроля атмосферы для спутников «Ямал» и модернизированы цифровые высотомеры «Кактус» для мягкой посадки «Союзов» (руководитель В.А. Гапонов). Проекты получили государственные награды в 2009 году.
В экстремальной робототехнике разработаны комплексы радиационной разведки РТК-03 для обнаружения и эвакуации источников излучения, востребованные военными и МЧС. Большинство оборонных проектов курировал заместитель директора В.И. Юдин, что укрепило финансы и имидж института.

Большинство работ по линии Министерства обороны велись под руководством заместителя директора В.И. Юдина. Его умение находить общий язык с заказчиками принесли большую помощь институту. Это касалось и финансов, и имиджа.
В июле 2000 года комплекс РТК-03 был использован в городе Грозный при проведении спецоперации Министерства по чрезвычайным ситуациям по поиску и эвакуации радиоактивных источников высокой активности. В экспедиции участвовали и сотрудники ЦНИИ РТК, отмеченные за свою работу правительственными наградами (А.В. Полин, А.В. Баранов).
В сентябре 2001 года «Робот-разведчик» участвовал в учениях НАТО Barents Rescue в Швеции и продемонстрировал свои возможности, что было очень высоко оценено зарубежными специалистами, представившими на учениях свои аналогичные разработки.
В 2000-х годах ЦНИИ РТК активно развивал робототехнику и радиационную разведку. В 2002–2003 годах созданы робот РТК-05 и полевой спектрометр ПБ-ГС «Дефляция», а в 2005–2006 годах — дистанционно управляемый робот «Берлога-Р» и вертолетный комплекс «Обнаружитель». В 2007–2008 годах разработаны системы контроля радиации АКРО «Астрахань-К-РТК», робототехнические комплексы РТК-07 и РТК-08 для работы в экстремальных условиях.
Возобновлены работы по подводной робототехнике, включая комплекс «Природа-А» (2006). Начаты внедрения робототехники в медицину (2005). Разработаны роботы «Змеелок» (2006) и интеллектуальные мобильные системы (2009).
В 2007 году сменился директор: В.А. Лопота перешёл в РКК «Энергия», а в 2009-м А.В. Лопота возглавил институт, что способствовало расширению заказчиков и объёмов работ. В 2010 году созданы мобильные роботы РТК-09 и РТК-10, а также комплекс КРКМ «Велосипед-Р». Продолжалось сотрудничество с Минобороны под руководством В.И. Юдина.
В 2010–2011 годах реализованы проекты на Ленинградской АЭС, разработки систем управления космическими роботами и завершён российско-немецкий космический эксперимент «Роквисс». Благодаря усилиям заместителя директора по науке А.С. Кондратьева ЦНИИ РТК укрепил позиции в космической робототехнике и совместно с РКК «Энергия» продолжил исследования шарниров манипуляторов для космоса.
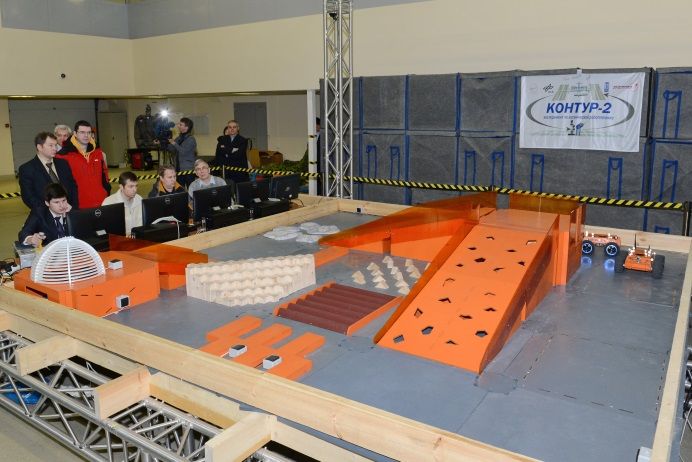
Почти десять лет в кооперации с Германским космическим агентством и РКК «Энергия» проводится космический эксперимент «Контур» по исследованию методов управления через Интернет робототехническими системами.
На первом этапе («Контур-1») отрабатывались навыки управления с Земли через Интернет роботом ROBOTIC на внешней поверхности МКС. На втором этапе («Контур-2») космонавты с борта МКС управляли роботами на Земле. На третьем этапе («Контур-3») планируется управление с борта МКС группой напланетных роботов. Два первых этапа успешно завершены, ведется подготовка к третьему.
В работах по «Контуру» активно участвовали А.С. Кондратьев, В.С. Заборовский, М.Ю. Гук и другие.
Исследования позволили создать новое поколение систем управления сетевыми ресурсами и эффективные методы построения защищённой телекоммуникационной инфраструктуры. Были разработаны и сертифицированы многофункциональные процессоры для межсетевых экранов и сетевых анализаторов.
По инициативе А.В. Лопоты в ЦНИИ РТК совершенствовалась организационная структура и внедрялись новые методы управления. Институт преобразован в Федеральное государственное автономное научное учреждение «ЦНИИ робототехники и технической кибернетики» (Приказ Минобрнауки РФ № 2912 от 30.12.2011) с сохранением статуса Государственного научного центра.
В 2010-е годы началось омоложение инженерных кадров — на работу стали приходить выпускники Санкт-Петербургского политеха и других вузов.
В 2012 году завершилось более 10-летнее сотрудничество с МНТЦ из-за выхода России из соглашения.
Одним из достижений стало издание научно-технического журнала «Робототехника и техническая кибернетика» (председатель совета — А.В. Лопота, главный редактор — Е.И. Юревич), зарегистрированного в 2013 году. В 2017 году журнал включён в перечень ВАК для публикации основных научных результатов диссертаций.
ЦНИИ РТК сегодня
Всё, о чём было рассказано выше, это уже история. Нам есть чем гордиться, нам есть, что вспомнить. Но всё это нами уже сделано. Мы же продолжаем двигаться вперед.
17 мая Б.Е. Щербина вызвал директора–главного конструктора ЦНИИ РТК в Москву и сообщил, что организация включена в проект постановления ЦК КПСС и Совета Министров СССР по работам в районе ЧАЭС по робототехнике. Ввиду срочности было приказано немедленно ехать на ЧАЭС для определения функций совместно с председателем Государственной комиссии. Уже 29 мая в Чернобыле вышло распоряжение председателя комиссии — заместителя Председателя Совета Министров СССР Л.А. Воронина — с заданием для ЦНИИ РТК и порядком его выполнения.
В нем ЦНИИ РТК поручалось до 15 июня поставить на ЧАЭС первые четыре экспериментальных образца роботов для испытаний в условиях станции и окончательного выбора основных технических решений, включая типы шасси, системы энергопитания и управления. До 1 июля необходимо было осуществить поставку пяти штатных роботов для их использования на станции. Уникальная особенность этого распоряжения и для подписавшего его заместителя Председателя Совета Министров СССР Л.А. Воронина, заключалась в том, что оно было написано от руки.
В дальнейшем использование роботов ЦНИИ РТК задавалось отдельными программами работ или решениями Правительственной комиссии. Результаты работ оформлялись актами, утвержденными руководством ЧАЭС. Первичными документами для этих актов, в свою очередь, служили совместные акты исполнителей работ от ЦНИИ РТК и представителей Министерства обороны, также утверждаемые ответственным лицом от ЧАЭС.
Позднее в связи с расширением объемов работ, выполняемых роботами, в практику вошли ежемесячные справки-отчеты руководства ЧАСЭС Государственной комиссии о работах роботов ЦНИИ РТК. Отдельно работа ЦНИИ РТК оценивалась еще и военными.
Со временем задания на работы с роботами стали оформлять в виде сводного плана, утверждаемого председателем правительственной комиссии — заместителем Председателя Совета Министров СССР. Первый такой план на июль 1986 года утвердил В.К. Гусев. Решением комиссии от 20 июля задачи ЦНИИ РТК ограничили роботами-разведчиками, а тяжелые роботы, в том числе для очистки кровли, поручили ВНИИтрансмашу и Институту физико-технических проблем. ЦНИИ РТК должны были передать этим организациям телевизионные радиосистемы и шасси тяжелых роботов, изготовленных Пролетарским заводом.
Тем не менее, почти все работы на станции выполнили роботы ЦНИИ РТК. Кроме них, на станцию доставили два срочно закупленных в ФРГ тяжелых радиоуправляемых робота MF-2 и MF-3, роботов «Белоярец» ПО «Атомэнергоремонт», два робота СТР ВНИИтрансмаша и робот МВТУ-2. Все они, кроме роботов СТР, вышли из строя и не успели выполнить значимых задач.
У немецких роботов под действием ионизирующих излучений отказала электроника. Один из них, например, был доставлен вертолетом на кровлю вблизи вентиляционной трубы для очистки ее совместно с роботом ЦНИИ РТК. Ночью он самопроизвольно включился, двинулся в сторону трубы и, уткнувшись в нее, забуксовал, пока не сломалась трансмиссия. Снимать его пришлось солдатам при помощи лебедок. Немного поработали на кровле только роботы СТР. Один из них смог добраться до самой верхней отметки на крыше у вытяжной трубы, но там у него отказали приводы. Он был также вытащен лебедкой, а затем снят с помощью установленного у третьего блока станции подъемного крана.
Что касается роботов-разведчиков, то этого типа роботы поставлялись только ЦНИИ РТК. Один из первых таких роботов был запущен прямо под взорвавшийся четвертый энергоблок. Робот передавал оттуда информацию почти сутки, затем «ослеп» и потерял управляемость.
Согласно официальным актам, сотрудники ЦНИИ РТК с помощью роботов выполнили на ЧАЭС:
- обследование более 10 тысяч м² помещений, кровли зданий и территории с составлением карт дозных полей и видеосъемкой;
- очистку свыше 4 тысяч м² кровли с сбросом радиоактивного мусора в провал на месте взрыва энергоблока;
- очистку 600 м² сильно загрязненной территории — иловых полей.
Несмотря на положительные оценки, руководство ЦНИИ РТК сталкивалось с недоброжелательством конкурентов, рассчитывавших на финансирование новых работ по «экстремальной робототехнике» — направлению, возникшему благодаря ликвидации аварии и ставшему сегодня ведущим в области искусственного интеллекта и креативных технологий.
Второе направление работ ЦНИИ РТК — обследование дозной обстановки в 30-километровой зоне и вокруг ЧАЭС с использованием систем «Зефир» (воздушный мониторинг), «Изъятие» (наземный мониторинг) и гамма-локатора. В сентябре 1986 года с помощью аппаратуры «Зефир-М» обследовали 250 км² территории, 93 населенных пункта и 6 дорог. После завершения работ разработки продолжались по заказам химических войск и АЭС под руководством И.Н. Коробкова.
На рубеже эпох
Со завершением экспедиций в Чернобыль можно было вернуться к плановым исследованиям, в том числе к созданию аппаратуры «Орион» для системы мягкой посадки на спутник Марса Фобос, разработанной в НПО им. Лавочкина (Корнеев, Попов, Воробьев, Дудин, Спасский). Основой системы — импульсный рентгеновский высотомер нового поколения. Космическое путешествие закончилось неудачей, но это произошло до истечения срока работы «Ориона».
В период с конца 1980-х до конца 1990-х годов ЦНИИ РТК прошёл через сложную трансформацию из-за политических и экономических изменений в стране. После ухода основателя Е.И. Юревича и прихода директора В.М. Николаева институт столкнулся с ослаблением государственной поддержки и переходом к рыночным механизмам.
Несмотря на трудности, были построены современные лаборатории и испытательные стенды, что позволило продолжить работы по космическим манипуляторам для программы «Буран». Однако финансовая нестабильность и появление «параллельных структур» привели к оттоку кадров и снижению научного потенциала.
С приходом в 1991 году директора В.А. Лопоты институт начал активную перестройку, сделав ставку на информационные технологии, международное сотрудничество и внешнеэкономическую деятельность. Были реализованы проекты с Китаем, Европой и Японией, а институт получил статус Государственного научного центра РФ, что повысило престиж и финансирование.
В этот период развивались направления робототехники, технической кибернетики и космических технологий, включая создание космического робота «Циркуль» и стенда имитации невесомости. Внедрение информационной инфраструктуры и выход в интернет расширили международные связи и повысили эффективность работы.
В конце 1990-х годов ЦНИИ РТК занялся разработкой систем противодействия терроризму, создав антитеррористического робота и совместно с ФСБ открыл Центр микроробототехники и технической кибернетики. Несмотря на сложности, институт сохранил научный потенциал и занял ведущие позиции в России и на международной арене.
На рубеже тысячелетий космическое приборостроение получило новый импульс. В 1998 году на орбитальном комплексе «Мир» испытали комплекс «Индикатор» для измерения параметров разреженной атмосферы.
Аппаратура появилась вовремя после разгерметизации модуля «Спектр» в 1997 году из-за столкновения с грузовиком «Прогресс М-34». В.А. Лопота вошёл в международную комиссию по безопасности МКС.
По результатам аварии в ЦНИИ РТК создали переносной индикатор мест разгерметизации для МКС, который сейчас является штатным оборудованием станции.
В начале третьего тысячелетия ЦНИИ РТК возобновил работы благодаря улучшению экономики. По заказу РКК «Энергия» создана система контроля атмосферы для спутников «Ямал» и модернизированы цифровые высотомеры «Кактус» для мягкой посадки «Союзов» (руководитель В.А. Гапонов). Проекты получили государственные награды в 2009 году.
В экстремальной робототехнике разработаны комплексы радиационной разведки РТК-03 для обнаружения и эвакуации источников излучения, востребованные военными и МЧС. Большинство оборонных проектов курировал заместитель директора В.И. Юдин, что укрепило финансы и имидж института.
Большинство работ по линии Министерства обороны велись под руководством заместителя директора В.И. Юдина. Его умение находить общий язык с заказчиками принесли большую помощь институту. Это касалось и финансов, и имиджа.
В июле 2000 года комплекс РТК-03 был использован в городе Грозный при проведении спецоперации Министерства по чрезвычайным ситуациям по поиску и эвакуации радиоактивных источников высокой активности. В экспедиции участвовали и сотрудники ЦНИИ РТК, отмеченные за свою работу правительственными наградами (А.В. Полин, А.В. Баранов).
В сентябре 2001 года «Робот-разведчик» участвовал в учениях НАТО Barents Rescue в Швеции и продемонстрировал свои возможности, что было очень высоко оценено зарубежными специалистами, представившими на учениях свои аналогичные разработки.
В 2000-х годах ЦНИИ РТК активно развивал робототехнику и радиационную разведку. В 2002–2003 годах созданы робот РТК-05 и полевой спектрометр ПБ-ГС «Дефляция», а в 2005–2006 годах — дистанционно управляемый робот «Берлога-Р» и вертолетный комплекс «Обнаружитель». В 2007–2008 годах разработаны системы контроля радиации АКРО «Астрахань-К-РТК», робототехнические комплексы РТК-07 и РТК-08 для работы в экстремальных условиях.
Возобновлены работы по подводной робототехнике, включая комплекс «Природа-А» (2006). Начаты внедрения робототехники в медицину (2005). Разработаны роботы «Змеелок» (2006) и интеллектуальные мобильные системы (2009).
В 2007 году сменился директор: В.А. Лопота перешёл в РКК «Энергия», а в 2009-м А.В. Лопота возглавил институт, что способствовало расширению заказчиков и объёмов работ. В 2010 году созданы мобильные роботы РТК-09 и РТК-10, а также комплекс КРКМ «Велосипед-Р». Продолжалось сотрудничество с Минобороны под руководством В.И. Юдина.
В 2010–2011 годах реализованы проекты на Ленинградской АЭС, разработки систем управления космическими роботами и завершён российско-немецкий космический эксперимент «Роквисс». Благодаря усилиям заместителя директора по науке А.С. Кондратьева ЦНИИ РТК укрепил позиции в космической робототехнике и совместно с РКК «Энергия» продолжил исследования шарниров манипуляторов для космоса.
Почти десять лет в кооперации с Германским космическим агентством и РКК «Энергия» проводится космический эксперимент «Контур» по исследованию методов управления через Интернет робототехническими системами.
На первом этапе («Контур-1») отрабатывались навыки управления с Земли через Интернет роботом ROBOTIC на внешней поверхности МКС. На втором этапе («Контур-2») космонавты с борта МКС управляли роботами на Земле. На третьем этапе («Контур-3») планируется управление с борта МКС группой напланетных роботов. Два первых этапа успешно завершены, ведется подготовка к третьему.
В работах по «Контуру» активно участвовали А.С. Кондратьев, В.С. Заборовский, М.Ю. Гук и другие.
Исследования позволили создать новое поколение систем управления сетевыми ресурсами и эффективные методы построения защищённой телекоммуникационной инфраструктуры. Были разработаны и сертифицированы многофункциональные процессоры для межсетевых экранов и сетевых анализаторов.
По инициативе А.В. Лопоты в ЦНИИ РТК совершенствовалась организационная структура и внедрялись новые методы управления. Институт преобразован в Федеральное государственное автономное научное учреждение «ЦНИИ робототехники и технической кибернетики» (Приказ Минобрнауки РФ № 2912 от 30.12.2011) с сохранением статуса Государственного научного центра.
В 2010-е годы началось омоложение инженерных кадров — на работу стали приходить выпускники Санкт-Петербургского политеха и других вузов.
В 2012 году завершилось более 10-летнее сотрудничество с МНТЦ из-за выхода России из соглашения.
Одним из достижений стало издание научно-технического журнала «Робототехника и техническая кибернетика» (председатель совета — А.В. Лопота, главный редактор — Е.И. Юревич), зарегистрированного в 2013 году. В 2017 году журнал включён в перечень ВАК для публикации основных научных результатов диссертаций.
ЦНИИ РТК сегодня
Всё, о чём было рассказано выше, это уже история. Нам есть чем гордиться, нам есть, что вспомнить. Но всё это нами уже сделано. Мы же продолжаем двигаться вперед.
Государственный научный центр Российской Федерации «ЦНИИ робототехники и технической кибернетики» — один из крупнейших научных центров России. Институт оснащён современной исследовательской и производственной базой, включая уникальные испытательные стенды и опытное производство. В коллективе работают высококвалифицированные специалисты с большим опытом реализации сложных проектов.
Основные направления деятельности: мехатроника и робототехника, интеллектуальные системы управления, фотонная и оптоэлектронная техника, космическое и специальное приборостроение, лазерные технологии, информационно-управляющие системы и тренажёры.
В институте действует аттестованная система менеджмента качества, имеются лицензии на разработку и изготовление вооружения и военной техники. Производственные процессы и контроль качества соответствуют высоким стандартам.
Производственная база включает механическую обработку металлов, слесарно-сборочные и сварочные работы, изготовление печатных плат, нанесение гальванических и лакокрасочных покрытий, а также изготовление кабелей.
Специалисты ЦНИИ РТК регулярно участвуют в крупных форумах и выставках, таких как Петербургский экономический форум, «Армия», МАКС, «Российский промышленник» и другие, где их разработки вызывают большой интерес и получают награды.

Государственный научный центр Российской Федерации «ЦНИИ робототехники и технической кибернетики» — один из крупнейших научных центров России. Институт оснащён современной исследовательской и производственной базой, включая уникальные испытательные стенды и опытное производство. В коллективе работают высококвалифицированные специалисты с большим опытом реализации сложных проектов.
Основные направления деятельности: мехатроника и робототехника, интеллектуальные системы управления, фотонная и оптоэлектронная техника, космическое и специальное приборостроение, лазерные технологии, информационно-управляющие системы и тренажёры.
В институте действует аттестованная система менеджмента качества, имеются лицензии на разработку и изготовление вооружения и военной техники. Производственные процессы и контроль качества соответствуют высоким стандартам.
Производственная база включает механическую обработку металлов, слесарно-сборочные и сварочные работы, изготовление печатных плат, нанесение гальванических и лакокрасочных покрытий, а также изготовление кабелей.
Специалисты ЦНИИ РТК регулярно участвуют в крупных форумах и выставках, таких как Петербургский экономический форум, «Армия», МАКС, «Российский промышленник» и другие, где их разработки вызывают большой интерес и получают награды.
Ежегодно в стенах института и на других площадках проводится международная конференция «Экстремальная робототехника», на которую съезжаются специалисты различных организаций и ведомств из многих городов России, ближнего и дальнего зарубежья. Прочитанные на конференции доклады впоследствии публикуются в виде сборников.
В 2013 году в цокольном этаже института был открыт музей предприятия. В его экспозиции представлена уникальная коллекция разработок ЦНИИ РТК в области робототехники, космического и специального приборостроения.
Востребованность разработок ЦНИИ РТК, новые, все более и более усложняющиеся, задачи, которые приходится решать его сотрудникам, все это позволяет говорить о том, что предприятие будет жить и дальше, оставаясь на передовых рубежах научно-технического прогресса.
Ежегодно в стенах института и на других площадках проводится международная конференция «Экстремальная робототехника», на которую съезжаются специалисты различных организаций и ведомств из многих городов России, ближнего и дальнего зарубежья. Прочитанные на конференции доклады впоследствии публикуются в виде сборников.
В 2013 году в цокольном этаже института был открыт музей предприятия. В его экспозиции представлена уникальная коллекция разработок ЦНИИ РТК в области робототехники, космического и специального приборостроения.
Востребованность разработок ЦНИИ РТК, новые, все более и более усложняющиеся, задачи, которые приходится решать его сотрудникам, все это позволяет говорить о том, что предприятие будет жить и дальше, оставаясь на передовых рубежах научно-технического прогресса.
В нем ЦНИИ РТК поручалось до 15 июня поставить на ЧАЭС первые четыре экспериментальных образца роботов для испытаний в условиях станции и окончательного выбора основных технических решений, включая типы шасси, системы энергопитания и управления. До 1 июля необходимо было осуществить поставку пяти штатных роботов для их использования на станции. Уникальная особенность этого распоряжения и для подписавшего его заместителя Председателя Совета Министров СССР Л.А. Воронина, заключалась в том, что оно было написано от руки.
В дальнейшем использование роботов ЦНИИ РТК задавалось отдельными программами работ или решениями Правительственной комиссии. Результаты работ оформлялись актами, утвержденными руководством ЧАЭС. Первичными документами для этих актов, в свою очередь, служили совместные акты исполнителей работ от ЦНИИ РТК и представителей Министерства обороны, также утверждаемые ответственным лицом от ЧАЭС.
Позднее в связи с расширением объемов работ, выполняемых роботами, в практику вошли ежемесячные справки-отчеты руководства ЧАСЭС Государственной комиссии о работах роботов ЦНИИ РТК. Отдельно работа ЦНИИ РТК оценивалась еще и военными.

Тем не менее, почти все работы на станции выполнили роботы ЦНИИ РТК. Кроме них, на станцию доставили два срочно закупленных в ФРГ тяжелых радиоуправляемых робота MF-2 и MF-3, роботов «Белоярец» ПО «Атомэнергоремонт», два робота СТР ВНИИтрансмаша и робот МВТУ-2. Все они, кроме роботов СТР, вышли из строя и не успели выполнить значимых задач.

Что касается роботов-разведчиков, то этого типа роботы поставлялись только ЦНИИ РТК. Один из первых таких роботов был запущен прямо под взорвавшийся четвертый энергоблок. Робот передавал оттуда информацию почти сутки, затем «ослеп» и потерял управляемость.
Согласно официальным актам, сотрудники ЦНИИ РТК с помощью роботов выполнили на ЧАЭС:
- обследование более 10 тысяч м² помещений, кровли зданий и территории с составлением карт дозных полей и видеосъемкой;
- очистку свыше 4 тысяч м² кровли с сбросом радиоактивного мусора в провал на месте взрыва энергоблока;
- очистку 600 м² сильно загрязненной территории — иловых полей.
Несмотря на положительные оценки, руководство ЦНИИ РТК сталкивалось с недоброжелательством конкурентов, рассчитывавших на финансирование новых работ по «экстремальной робототехнике» — направлению, возникшему благодаря ликвидации аварии и ставшему сегодня ведущим в области искусственного интеллекта и креативных технологий.
Второе направление работ ЦНИИ РТК — обследование дозной обстановки в 30-километровой зоне и вокруг ЧАЭС с использованием систем «Зефир» (воздушный мониторинг), «Изъятие» (наземный мониторинг) и гамма-локатора. В сентябре 1986 года с помощью аппаратуры «Зефир-М» обследовали 250 км² территории, 93 населенных пункта и 6 дорог. После завершения работ разработки продолжались по заказам химических войск и АЭС под руководством И.Н. Коробкова.
На рубеже эпох
Со завершением экспедиций в Чернобыль можно было вернуться к плановым исследованиям, в том числе к созданию аппаратуры «Орион» для системы мягкой посадки на спутник Марса Фобос, разработанной в НПО им. Лавочкина (Корнеев, Попов, Воробьев, Дудин, Спасский). Основой системы — импульсный рентгеновский высотомер нового поколения. Космическое путешествие закончилось неудачей, но это произошло до истечения срока работы «Ориона».
В период с конца 1980-х до конца 1990-х годов ЦНИИ РТК прошёл через сложную трансформацию из-за политических и экономических изменений в стране. После ухода основателя Е.И. Юревича и прихода директора В.М. Николаева институт столкнулся с ослаблением государственной поддержки и переходом к рыночным механизмам.
Несмотря на трудности, были построены современные лаборатории и испытательные стенды, что позволило продолжить работы по космическим манипуляторам для программы «Буран». Однако финансовая нестабильность и появление «параллельных структур» привели к оттоку кадров и снижению научного потенциала.
С приходом в 1991 году директора В.А. Лопоты институт начал активную перестройку, сделав ставку на информационные технологии, международное сотрудничество и внешнеэкономическую деятельность. Были реализованы проекты с Китаем, Европой и Японией, а институт получил статус Государственного научного центра РФ, что повысило престиж и финансирование.
В этот период развивались направления робототехники, технической кибернетики и космических технологий, включая создание космического робота «Циркуль» и стенда имитации невесомости. Внедрение информационной инфраструктуры и выход в интернет расширили международные связи и повысили эффективность работы.
В конце 1990-х годов ЦНИИ РТК занялся разработкой систем противодействия терроризму, создав антитеррористического робота и совместно с ФСБ открыл Центр микроробототехники и технической кибернетики. Несмотря на сложности, институт сохранил научный потенциал и занял ведущие позиции в России и на международной арене.
На рубеже тысячелетий космическое приборостроение получило новый импульс. В 1998 году на орбитальном комплексе «Мир» испытали комплекс «Индикатор» для измерения параметров разреженной атмосферы.
Аппаратура появилась вовремя после разгерметизации модуля «Спектр» в 1997 году из-за столкновения с грузовиком «Прогресс М-34». В.А. Лопота вошёл в международную комиссию по безопасности МКС.
По результатам аварии в ЦНИИ РТК создали переносной индикатор мест разгерметизации для МКС, который сейчас является штатным оборудованием станции.

В начале третьего тысячелетия ЦНИИ РТК возобновил работы благодаря улучшению экономики. По заказу РКК «Энергия» создана система контроля атмосферы для спутников «Ямал» и модернизированы цифровые высотомеры «Кактус» для мягкой посадки «Союзов» (руководитель В.А. Гапонов). Проекты получили государственные награды в 2009 году.
В экстремальной робототехнике разработаны комплексы радиационной разведки РТК-03 для обнаружения и эвакуации источников излучения, востребованные военными и МЧС. Большинство оборонных проектов курировал заместитель директора В.И. Юдин, что укрепило финансы и имидж института.

В июле 2000 года комплекс РТК-03 был использован в городе Грозный при проведении спецоперации Министерства по чрезвычайным ситуациям по поиску и эвакуации радиоактивных источников высокой активности. В экспедиции участвовали и сотрудники ЦНИИ РТК, отмеченные за свою работу правительственными наградами (А.В. Полин, А.В. Баранов).
В сентябре 2001 года «Робот-разведчик» участвовал в учениях НАТО Barents Rescue в Швеции и продемонстрировал свои возможности, что было очень высоко оценено зарубежными специалистами, представившими на учениях свои аналогичные разработки.
В 2000-х годах ЦНИИ РТК активно развивал робототехнику и радиационную разведку. В 2002–2003 годах созданы робот РТК-05 и полевой спектрометр ПБ-ГС «Дефляция», а в 2005–2006 годах — дистанционно управляемый робот «Берлога-Р» и вертолетный комплекс «Обнаружитель». В 2007–2008 годах разработаны системы контроля радиации АКРО «Астрахань-К-РТК», робототехнические комплексы РТК-07 и РТК-08 для работы в экстремальных условиях.
Возобновлены работы по подводной робототехнике, включая комплекс «Природа-А» (2006). Начаты внедрения робототехники в медицину (2005). Разработаны роботы «Змеелок» (2006) и интеллектуальные мобильные системы (2009).
В 2007 году сменился директор: В.А. Лопота перешёл в РКК «Энергия», а в 2009-м А.В. Лопота возглавил институт, что способствовало расширению заказчиков и объёмов работ. В 2010 году созданы мобильные роботы РТК-09 и РТК-10, а также комплекс КРКМ «Велосипед-Р». Продолжалось сотрудничество с Минобороны под руководством В.И. Юдина.
В 2010–2011 годах реализованы проекты на Ленинградской АЭС, разработки систем управления космическими роботами и завершён российско-немецкий космический эксперимент «Роквисс». Благодаря усилиям заместителя директора по науке А.С. Кондратьева ЦНИИ РТК укрепил позиции в космической робототехнике и совместно с РКК «Энергия» продолжил исследования шарниров манипуляторов для космоса.
Почти десять лет в кооперации с Германским космическим агентством и РКК «Энергия» проводится космический эксперимент «Контур» по исследованию методов управления через Интернет робототехническими системами.
На первом этапе («Контур-1») отрабатывались навыки управления с Земли через Интернет роботом ROBOTIC на внешней поверхности МКС. На втором этапе («Контур-2») космонавты с борта МКС управляли роботами на Земле. На третьем этапе («Контур-3») планируется управление с борта МКС группой напланетных роботов. Два первых этапа успешно завершены, ведется подготовка к третьему.
В работах по «Контуру» активно участвовали А.С. Кондратьев, В.С. Заборовский, М.Ю. Гук и другие.

Исследования позволили создать новое поколение систем управления сетевыми ресурсами и эффективные методы построения защищённой телекоммуникационной инфраструктуры. Были разработаны и сертифицированы многофункциональные процессоры для межсетевых экранов и сетевых анализаторов.
По инициативе А.В. Лопоты в ЦНИИ РТК совершенствовалась организационная структура и внедрялись новые методы управления. Институт преобразован в Федеральное государственное автономное научное учреждение «ЦНИИ робототехники и технической кибернетики» (Приказ Минобрнауки РФ № 2912 от 30.12.2011) с сохранением статуса Государственного научного центра.
В 2010-е годы началось омоложение инженерных кадров — на работу стали приходить выпускники Санкт-Петербургского политеха и других вузов.
В 2012 году завершилось более 10-летнее сотрудничество с МНТЦ из-за выхода России из соглашения.
Одним из достижений стало издание научно-технического журнала «Робототехника и техническая кибернетика» (председатель совета — А.В. Лопота, главный редактор — Е.И. Юревич), зарегистрированного в 2013 году. В 2017 году журнал включён в перечень ВАК для публикации основных научных результатов диссертаций.
ЦНИИ РТК сегодня
Всё, о чём было рассказано выше, это уже история. Нам есть чем гордиться, нам есть, что вспомнить. Но всё это нами уже сделано. Мы же продолжаем двигаться вперед.
Государственный научный центр Российской Федерации «ЦНИИ робототехники и технической кибернетики» — один из крупнейших научных центров России. Институт оснащён современной исследовательской и производственной базой, включая уникальные испытательные стенды и опытное производство. В коллективе работают высококвалифицированные специалисты с большим опытом реализации сложных проектов.
Основные направления деятельности: мехатроника и робототехника, интеллектуальные системы управления, фотонная и оптоэлектронная техника, космическое и специальное приборостроение, лазерные технологии, информационно-управляющие системы и тренажёры.
В институте действует аттестованная система менеджмента качества, имеются лицензии на разработку и изготовление вооружения и военной техники. Производственные процессы и контроль качества соответствуют высоким стандартам.
Производственная база включает механическую обработку металлов, слесарно-сборочные и сварочные работы, изготовление печатных плат, нанесение гальванических и лакокрасочных покрытий, а также изготовление кабелей.
Специалисты ЦНИИ РТК регулярно участвуют в крупных форумах и выставках, таких как Петербургский экономический форум, «Армия», МАКС, «Российский промышленник» и другие, где их разработки вызывают большой интерес и получают награды.

В 2013 году в цокольном этаже института был открыт музей предприятия. В его экспозиции представлена уникальная коллекция разработок ЦНИИ РТК в области робототехники, космического и специального приборостроения.
Востребованность разработок ЦНИИ РТК, новые, все более и более усложняющиеся, задачи, которые приходится решать его сотрудникам, все это позволяет говорить о том, что предприятие будет жить и дальше, оставаясь на передовых рубежах научно-технического прогресса.

Специальная оценка условий труда/ Программное обеспечение/ Документы/ Противодействие коррупции / Дипломы и награды
194064, Россия, Санкт-Петербург, Тихорецкий пр., 21
+7 (812) 552-01-10
rtc@rtc.ru
© 1998-2025 ЦНИИ РТК. Все права защищены